

Es gibt einen grundlegenden Unterschied zwischen der Vektorsteuerung und der Sinuswellensteuerung von bürstenlosen Motoren, nämlich die Art und Weise, wie sie den Strom von bürstenlosen Motoren steuern. Mit zunehmender Geschwindigkeit des bürstenlosen Motors erreicht die Bandbreite des PI-Reglers für die Sinuswellensteuerung die Grenze, was zu einem Steuerungsfehler führt. Im Gegensatz dazu erreicht die Vektorsteuerung eine präzise Steuerung des Statorspulenstroms durch direkte Steuerung der Vektorstromkomponenten in den parallelen und senkrechten Richtungen des Rotormagnetfelds. Bei der Vektorsteuerung ändert sich die Stromsteuerung nicht mehr mit der Zeit, sondern wird zu einer statischen Gleichstromsteuerung, wodurch die Einschränkungen der Frequenzantwort und der Phasendrift beseitigt werden. Daher hat die Stromqualität im Vektorsteuerungsmodus nichts mit der Motordrehzahl zu tun.
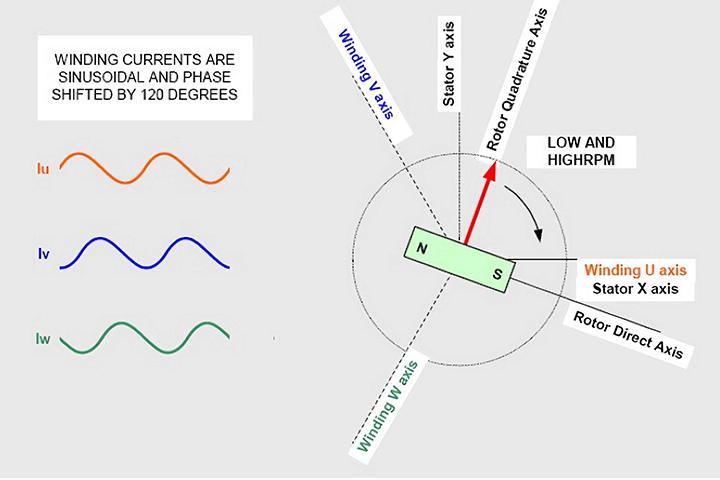
Bei der Vektorsteuerung steuern wir hauptsächlich die Komponenten des bürstenlosen Motorstroms und der Spannung in paralleler und vertikaler Richtung des Rotormagnetfelds. Dies bedeutet, dass wir den vom bürstenlosen Motor gemessenen Strom mathematisch berechnen müssen, um ihn von der dreiphasigen statischen Struktur des Stators in die dynamische dq-Struktur des Rotors (parallel und senkrecht zur Rotormagnetfeldrichtung) umzuwandeln. In ähnlicher Weise muss auch die Steuerspannung am Ende des bürstenlosen Motors mathematisch berechnet werden, um sie von der dq-Struktur des Rotors in die dreiphasige statische Struktur des Stators umzuwandeln und dann zur Modulation in den PWM-Teil einzugeben. Diese Konvertierungen erfordern mathematische Hochgeschwindigkeitsverarbeitungsfunktionen, sodass DSP und Hochleistungsprozessoren zum Kern der Vektorsteuerung werden.
Obwohl diese Umwandlung in nur einer Berechnung abgeschlossen werden kann, teilen wir sie der Einfachheit halber in zwei Schritte auf. Zuerst ändert sich der Motorstrom von der physikalischen Dreiphasenstruktur des Stators mit einer Phasendifferenz von 120 Grad zu einer stabilen dynamischen rechtwinkligen orthogonalen dq-Struktur und wandelt dann diese dynamische Struktur des Stators in die dreiphasige statische Struktur des Rotors um. Um gültige Ergebnisse zu gewährleisten, müssen diese Berechnungen innerhalb einer Abtastperiode des PI-Reglers abgeschlossen werden. Die obige Umwandlung ist das Gegenteil des Vorgangs der Umwandlung des vom PI-Regler benötigten Spannungssignals von der dq-Struktur in die Dreiphasenstruktur der Statorspule.
Sobald der Strom des bürstenlosen Motors in eine dq-Struktur umgewandelt wurde, wird die Steuerung sehr einfach. Wir benötigen zwei PI-Regler: einen zur Steuerung des Stroms parallel zum Rotormagnetfeld und einen zur Steuerung des Stroms senkrecht zum Rotormagnetfeld. Da das Steuersignal des parallelen Stroms Null ist, wird auch die parallele Stromkomponente des bürstenlosen Motors Null, wodurch alle Stromvektoren des bürstenlosen Motors in vertikalen Strom umgewandelt werden. Dies maximiert die Effizienz bürstenloser Motoren, da nur vertikaler Strom ein effektives Drehmoment erzeugen kann. Ein weiterer PI-Regler wird hauptsächlich zur Steuerung des vertikalen Stroms verwendet, um das erforderliche Drehmoment im Einklang mit dem Eingangssignal zu erhalten. Dadurch wird sichergestellt, dass der vertikale Strom nach Bedarf gesteuert wird, um das erforderliche Drehmoment zu erhalten.
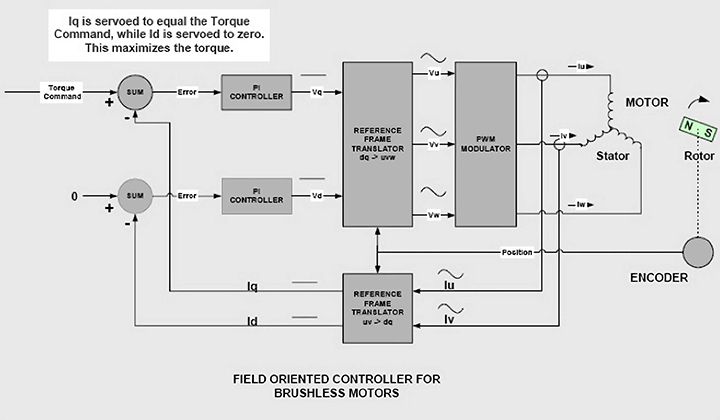
Die Ausgangssignale der beiden PI-Regler stellen den Spannungsvektor des Rotors dar. Diese statischen Spannungsvektoren werden einer Reihe von Referenzkoordinatenumwandlungen unterzogen, um die für die Ausgangsbrücke erforderlichen Spannungssteuersignale zu erhalten. Sie werden zunächst von der dynamischen dq-Referenzstruktur des Rotors in die statische xy-Struktur des Stators umgewandelt. Das Spannungssignal wird dann in physikalische Strukturen umgewandelt, die 120 Grad voneinander entfernt sind, und schließlich in die dreiphasigen U-, V- und W-Spulen des bürstenlosen Motors eingegeben. Diese drei Spannungssignale müssen PWM-moduliert werden, bevor sie in die Spule des bürstenlosen Motors eingegeben werden.
Die Arbeit der Umwandlung der zeitabhängigen sinusförmigen Strom- und Spannungssignale in der Spule des bürstenlosen Motors in ein Gleichstromsignal mit dq-Struktur besteht in der Umwandlung der Referenzkoordinaten.
Der wesentliche Unterschied zwischen Sinuskommutierung und Vektorsteuerung liegt in der Art und Weise, wie Koordinatenumwandlung und Stromsteuerung gehandhabt werden. Bei der Sinuskommutierungsmethode führen wir zuerst eine Kommutierung durch und erhalten dann den erforderlichen Sinusstrom durch PI-Steuerung. Daher verarbeitet die PI-Steuerung des Systems hauptsächlich die zeitabhängigen sinusförmigen Signale von Strom und Spannung des bürstenlosen Motors, und die Leistung des bürstenlosen Motors wird durch die Bandbreite und Phasendrift des Reglers begrenzt. Bei der Vektorsteuerung wird das Stromsignal zuerst durch PI gesteuert und dann einer Hochgeschwindigkeitskommutierungsverarbeitung unterzogen. Daher muss der PI-Regler keine zeitabhängigen Strom- und Spannungssignale verarbeiten, und das System wird nicht durch die Bandbreite und Phasendrift des PI-Reglers beeinflusst.
Warum ist die Vektorkontrolle also besser?
Die Vektorsteuerung sorgt dafür, dass sich der Motor bei niedrigen und hohen Drehzahlen gleichmäßig verhält. Im Gegensatz dazu ermöglicht die Sinuskommutierung einen gleichmäßigen Betrieb bei niedrigen Drehzahlen, führt jedoch zu einer erheblichen Verringerung der Effizienz bei hohen Drehzahlen. Die Trapezwellenkommutierung verhält sich normal, wenn der Motor mit hoher Drehzahl läuft, verursacht jedoch Drehmomentschwankungen bei niedriger Drehzahl. Daher gilt die Vektorsteuerung als die beste Steuerungsmethode für bürstenlose Motoren.










