Einführung
Schrittmotoren wandeln elektrische Impulssignale in entsprechende Winkel- oder Linearbewegungen um. Mit jedem Eingangsimpulssignal dreht sich der Rotor um einen bestimmten Winkel oder bewegt sich einen Schritt vorwärts. Die ausgegebene Winkel- oder Linearbewegung ist proportional zur Anzahl der Eingangsimpulse und die Geschwindigkeit ist proportional zur Impulsfrequenz. Daher fungieren Schrittmotoren als Komponenten, die Impulse in Winkel- (oder Linear-)Bewegungen umwandeln.
Schrittmotoren haben einen mehrpoligen verteilten Rotor und Stator mit mehrphasigen, sternförmig geschalteten Steuerwicklungen. Jedes Eingangsimpulssignal bewirkt, dass sich der Rotor des Schrittmotors um einen Schritt vorwärtsbewegt. Da der Eingang ein Impulssignal ist, ist die Winkelverschiebung am Ausgang diskontinuierlich, daher der Name „Impulsmotor“.
Mit der Entwicklung digitaler Steuerungssysteme wird sich die Anwendung von Schrittmotoren allmählich erweitern. Schrittmotoren gibt es je nach Struktur in verschiedenen Typen, darunter Blind-, Erreger- und Hybridmotoren, und können je nach Anzahl der Phasen in einphasige, zweiphasige und mehrphasige Motoren eingeteilt werden.
Niederspannungs-Gleichstrom-Servomotor
Unter Niederspannungs-Gleichstrom-Servomotoren versteht man Motoren, die Steuersignalbefehlen strikt folgen: Der Rotor bleibt stationär, bis ein Steuersignal ausgegeben wird. Bei Signalausgabe dreht sich der Rotor sofort. Und wenn das Steuersignal verschwindet, stoppt der Rotor sofort.
Niederspannungs-Gleichstrom-Servomotoren sind Mikromotoren, die als Betätigungselemente in automatischen Steuergeräten verwendet werden und elektrische Signale in Winkelverschiebungen oder Winkelgeschwindigkeiten der Welle umwandeln. Ihre Hauptmerkmale sind: keine Eigenrotation bei Nullsignalspannung, Geschwindigkeitsabnahme bei zunehmendem Drehmoment und hochpräzise Geschwindigkeits- und Positionsregelung.
Die Grundstruktur von Niederspannungs-Gleichstrom-Servomotoren ähnelt der von herkömmlichen Gleichstrommotoren.
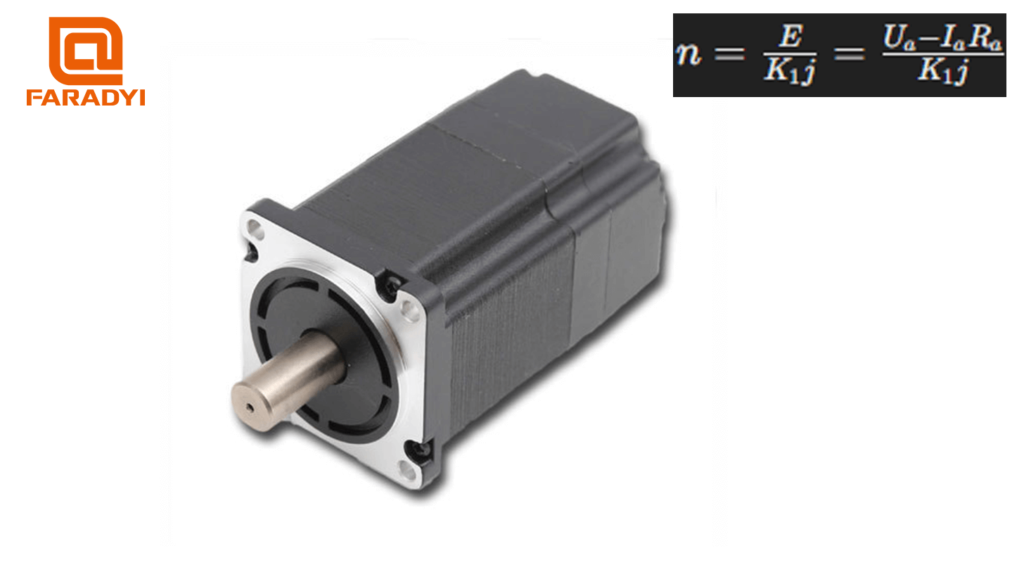
Die Motordrehzahl N ergibt sich aus der Formel:
Wo E ist die gegenelektromotorische Kraft des Ankers, K ist eine Konstante, J ist der Fluss pro Pol, Ua Und, Ia sind die Ankerspannung und der Ankerstrom, und Ra ist der Ankerwiderstand. Ändern Ua oder ϕ kann die Geschwindigkeit des Niederspannungs-Gleichstrom-Servomotors steuern. Im Allgemeinen wird jedoch die Methode zur Steuerung der Ankerspannung angewendet. Bei Permanentmagnet-Niederspannungs-Gleichstrom-Servomotoren wird die Erregerwicklung durch Permanentmagnete ersetzt, wodurch der magnetische Fluss erhalten bleibt ϕ konstant. Niederspannungs-DC-Servomotoren verfügen über gute lineare Anpassungseigenschaften und schnelle Reaktionszeiten.
Vergleich der Leistungsmerkmale von Niederspannungs-Gleichstrom-Servomotoren und Schrittmotoren:
Während Schrittmotoren und Niederspannungs-Gleichstrom-Servomotoren Ähnlichkeiten in den Steuerungsmethoden (Impulsfolgen und Richtungssignale) aufweisen, gibt es erhebliche Unterschiede in ihrer Leistung und ihren Anwendungsszenarien. Vergleichen wir ihre Leistungsmerkmale:
Unterschied in der Kontrollpräzision:
-
- Anzahl der Phasen bei Schrittmotoren: Dies bezieht sich auf die Anzahl der Spulengruppen im Motor. Häufig verwendete Schrittmotoren haben zweiphasige, dreiphasige, vierphasige und fünfphasige Konfigurationen. Unterschiedliche Phasenzahlen entsprechen unterschiedlichen Schrittwinkeln. Beispielsweise haben Zweiphasenmotoren typischerweise Schrittwinkel von 0,9°/1,8°, Dreiphasenmotoren 0,75°/1,5° und Fünfphasenmotoren 0,36°/0,72°. Wenn kein unterteilter Treiber vorhanden ist, wählen Benutzer hauptsächlich Schrittmotoren mit unterschiedlichen Phasenzahlen, um ihre Schrittwinkelanforderungen zu erfüllen. Mit einem unterteilten Treiber wird die „Phasenzahl“ bedeutungslos, da Benutzer den Schrittwinkel ändern können, indem sie die Unterteilungszahl auf dem Treiber ändern.
- Regelpräzision von Niederspannungs-Gleichstrom-Servomotoren: Dies wird durch den Drehgeber am hinteren Ende der Motorwelle gewährleistet. Bei Motoren, die mit Standard-Encodern mit 2500 Zeilen ausgestattet sind, beträgt das Impulsäquivalent aufgrund der Verwendung der Vervierfachungstechnologie durch den Treiber 360°10000=0,036°10000360°=0,036°. Bei Motoren mit 17-Bit-Encodern empfängt der Treiber 131.072 Impulse pro Motorumdrehung, was zu einem Impulsäquivalent von 360°131072=0,0027466°131072360°=0,0027466° führt, was 1/655 des Impulsäquivalents eines Schrittmotors mit einem Schrittwinkel von 1,8° entspricht.
Unterschied in den Niederfrequenzeigenschaften:
-
- Niederfrequente Vibrationen in Schrittmotoren: Schrittmotoren neigen bei niedrigen Drehzahlen zu niederfrequenten Vibrationen. Die Vibrationsfrequenz hängt von der Lastbedingung und der Leistung des Treibers ab. Die Vibrationsfrequenz beträgt normalerweise die Hälfte der Leerlauf-Startfrequenz des Motors. Diese niederfrequenten Vibrationen, die durch das Funktionsprinzip der Schrittmotoren bedingt sind, sind für den normalen Maschinenbetrieb äußerst schädlich. Wenn Schrittmotoren bei niedrigen Drehzahlen laufen, werden üblicherweise Dämpfungstechniken wie das Hinzufügen von Dämpfern zum Motor oder der Einsatz von Unterteilungstechnologie im Treiber eingesetzt, um niederfrequente Vibrationen zu überwinden.
- Stabiler Betrieb von Niederspannungs-DC-Servomotoren: Niederspannungs-Gleichstrom-Servomotoren laufen reibungslos und ohne Vibrationen, selbst bei niedrigen Geschwindigkeiten. Niederspannungs-Gleichstrom-Servosysteme verfügen über Resonanzunterdrückungsfunktionen, die mechanische Steifigkeitsmängel ausgleichen. Darüber hinaus verfügt das System über interne Frequenzanalysefunktionen (FFT), die mechanische Resonanzpunkte erkennen und so Systemanpassungen erleichtern können.
Unterschied in der Drehmoment-Frequenz-Kennlinie:
-
- Abtriebsdrehmoment von Schrittmotoren: Das Ausgangsdrehmoment von Schrittmotoren verringert sich mit zunehmender Drehzahl und fällt bei höheren Drehzahlen stark ab. Daher liegt ihre maximale Betriebsdrehzahl im Allgemeinen zwischen 300 und 600 U/min.
- Konstante Drehmomentabgabe von Niederspannungs-Gleichstrom-Servomotoren: Gleichstrom-Servomotoren mit niedriger Spannung bieten eine konstante Drehmomentabgabe und können bei Drehzahlen über der Nenndrehzahl das Nenndrehmoment liefern, wodurch eine konstante Leistungsabgabe gewährleistet wird.
Unterschied in der Überlastkapazität:
Schrittmotoren sind im Allgemeinen nicht überlastbar. Niederspannungs-Gleichstrom-Servomotoren sind dagegen stark überlastbar.
Niederspannungs-Gleichstrom-Servomotoren sind in Bezug auf Drehzahl und Drehmoment überlastbar. Ihr maximales Drehmoment beträgt das Dreifache des Nenndrehmoments und kann verwendet werden, um das Trägheitsdrehmoment der Last beim Start zu überwinden.
Schrittmotoren verfügen nicht über diese Überlastfähigkeit. Um dieses Trägheitsdrehmoment zu überwinden, wird daher häufig ein Schrittmotor mit einem größeren Drehmoment ausgewählt, was zu Drehmomentverlusten während des normalen Maschinenbetriebs führt.
Unterschied in der Betriebsleistung:
-
- Steuerung von Schrittmotoren: Schrittmotoren arbeiten mit offener Regelung. Hohe Anlauffrequenzen oder übermäßige Belastungen können zu verpassten Schritten oder zum Abwürgen des Motors führen. Beim Anhalten kann eine hohe Drehzahl zu einem Überschwingen führen. Um eine genaue Regelung zu gewährleisten, müssen daher die Probleme der Beschleunigung und Verzögerung richtig behandelt werden.
- Steuerung von Niederspannungs-Gleichstrom-Servosystemen: Niederspannungs-DC-Servoantriebssysteme arbeiten mit geschlossenem Regelkreis. Der Treiber kann das Rückmeldesignal des Motorgebers direkt abtasten und intern eine Positionsschleife und eine Geschwindigkeitsschleife bilden. Dadurch werden die mit Schrittmotoren verbundenen verpassten Schritte oder Überschwinger vermieden und eine zuverlässigere Steuerungsleistung gewährleistet.
Unterschied in der Geschwindigkeitsreaktionsleistung:
-
- Schrittmotoren: Schrittmotoren benötigen 200–400 Millisekunden, um vom Stillstand auf Betriebsgeschwindigkeit (typischerweise mehrere Hundert Umdrehungen pro Minute) zu beschleunigen.
- Niederspannungs-Gleichstrom-Servosysteme: Niederspannungs-DC-Servosysteme verfügen über eine ausgezeichnete Beschleunigungsleistung und benötigen nur wenige Millisekunden, um vom Stillstand auf ihre Nenndrehzahl von 3000 U/min zu beschleunigen. Damit eignen sie sich für Steuerungsanwendungen, die einen schnellen Start erfordern.