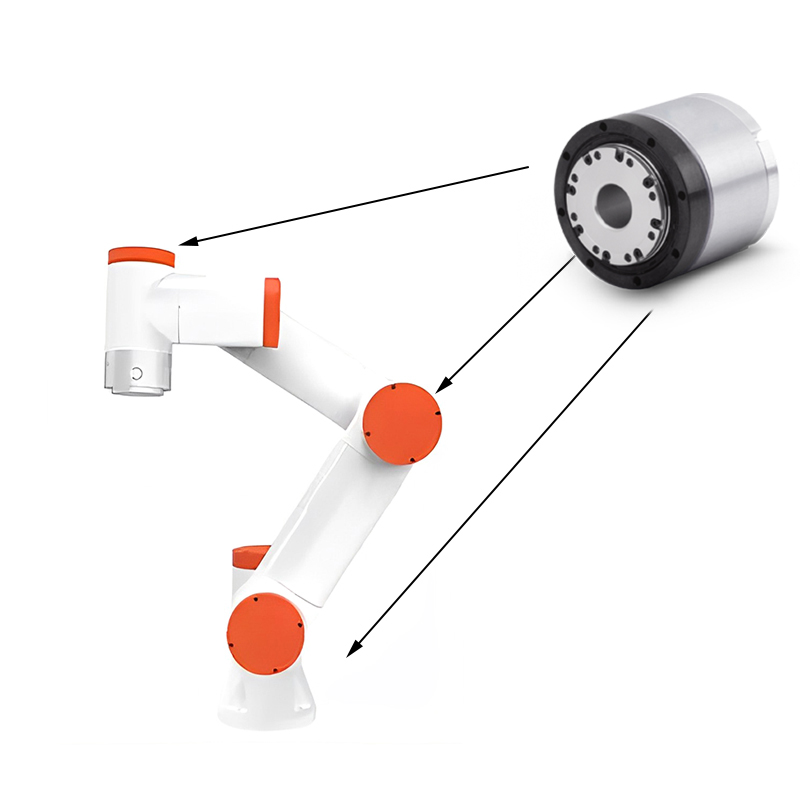
Ein Robotergelenkmodulmotor ist ein Motortyp, der speziell für den Einsatz in Robotergelenkanwendungen entwickelt wurde. Diese Motoren werden verwendet, um die Bewegung von Roboterarmen und anderen Arten von Robotergelenken zu steuern.
Es gibt verschiedene Motortypen, die als Robotergelenkmodulmotoren verwendet werden können, darunter Servomotoren, Schrittmotoren, Gleichstromgetriebemotoren, bürstenlose Motoren, Linearantriebe, Wechselstromservomotoren und Harmonic-Drive-Motoren. Jeder dieser Motortypen hat seine eigenen Stärken und Schwächen, und die Wahl des Motors hängt von den spezifischen Anforderungen der Robotergelenkanwendung ab.
Motoren für Robotergelenkmodule sind wichtige Komponenten von Robotersystemen, da sie für die genaue Steuerung der Bewegung der Robotergelenke verantwortlich sind. Ohne eine zuverlässige und präzise Motorsteuerung wäre ein Roboterarm oder ein anderer Gelenkrobotermechanismus nicht in der Lage, seine vorgesehenen Aufgaben zu erfüllen.
Neben ihrer Verwendung in der Robotik können Robotergelenkmodulmotoren auch in anderen Anwendungen eingesetzt werden, in denen eine präzise und zuverlässige Motorsteuerung erforderlich ist, beispielsweise in der industriellen Automatisierung oder bei medizinischen Geräten.