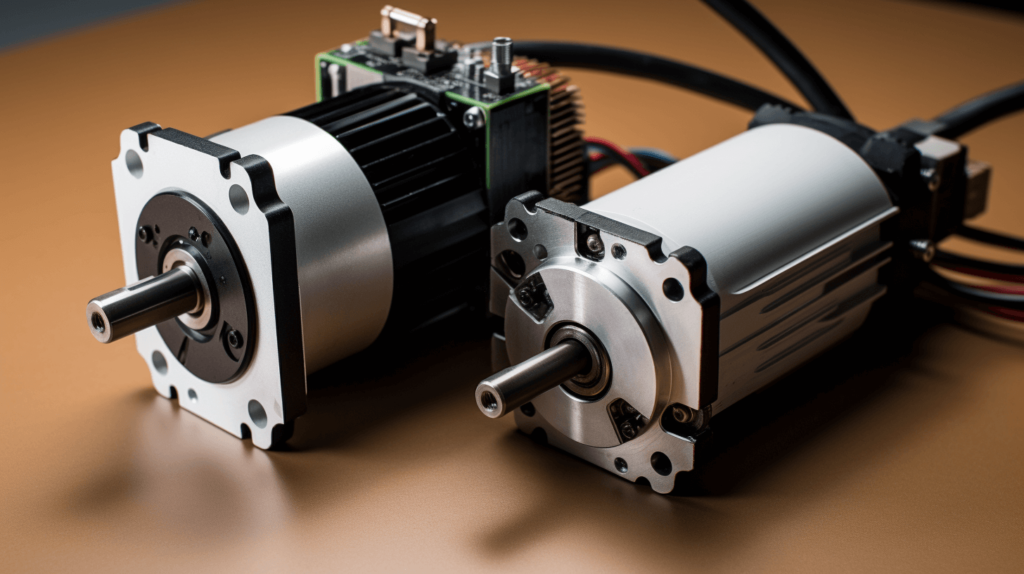
Sowohl Schritt- als auch Servomotoren werden häufig in Automatisierungs- und Roboteranwendungen eingesetzt. Doch was sind die Hauptunterschiede zwischen diesen beiden Motortypen und wie ermitteln Sie, welcher für Ihr spezifisches Projekt am besten geeignet ist? In diesem Leitfaden werden Aufbau, Funktionalität, Vor- und Nachteile, Kosten und ideale Anwendungsfälle von Schritt- und Servomotoren verglichen.
Grundlagen zu Schrittmotoren
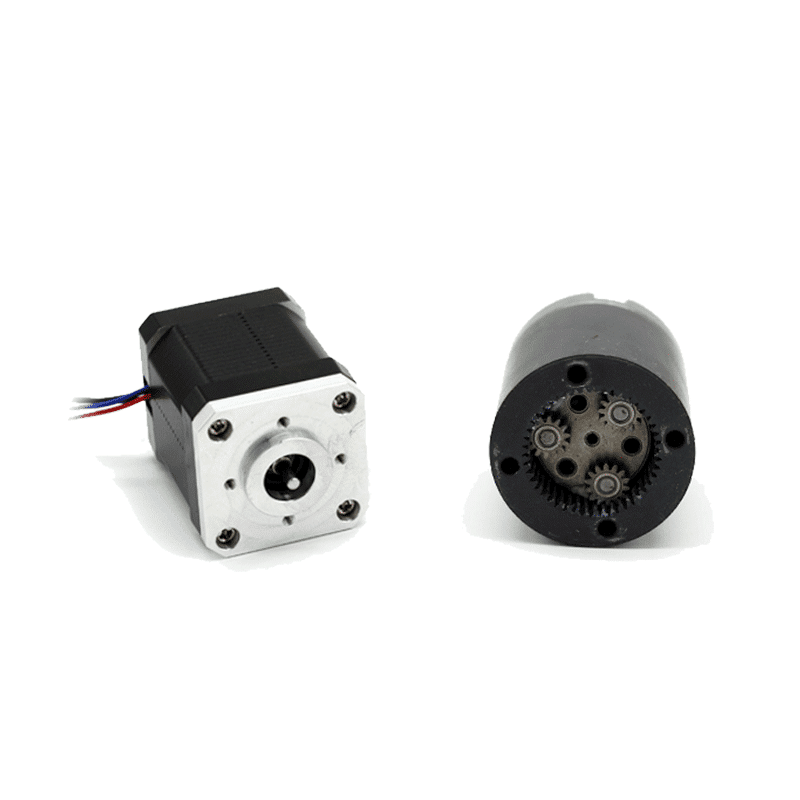
Schrittmotoren funktionieren, indem sie elektrische Impulse in diskrete mechanische Bewegungen oder Schritte umwandeln. Wichtige Merkmale:
Konstruiert mit einem Permanentmagnetrotor und einem gewickelten Stator.
Angetrieben durch Gleichstrom, der die Statorspulen erregt, um den Rotor schrittweise magnetisch zu drehen.
Offene Regelschleife, daher kein Feedback erforderlich.
Hervorragendes Drehmoment und Präzision bei niedriger Drehzahl aufgrund der hohen Polzahl.
Hält die Position im Ruhezustand.
Zu den Nachteilen zählen eine Drehmomentreduzierung bei hohen Drehzahlen und die mangelnde Reaktionsfähigkeit auf Laständerungen.
Insgesamt eignen sich Schrittmotoren hervorragend für Anwendungen, die hohe Präzision und Haltedrehmoment bei niedrigen Drehzahlen erfordern. Sie sind einfach zu steuern und stellen eine kostengünstige Lösung dar.
Grundlagen des Servomotors
Servomotoren nutzen Positionsrückmeldung für die Drehzahl- und Drehmomentregelung im geschlossenen Regelkreis. Wichtige Merkmale:
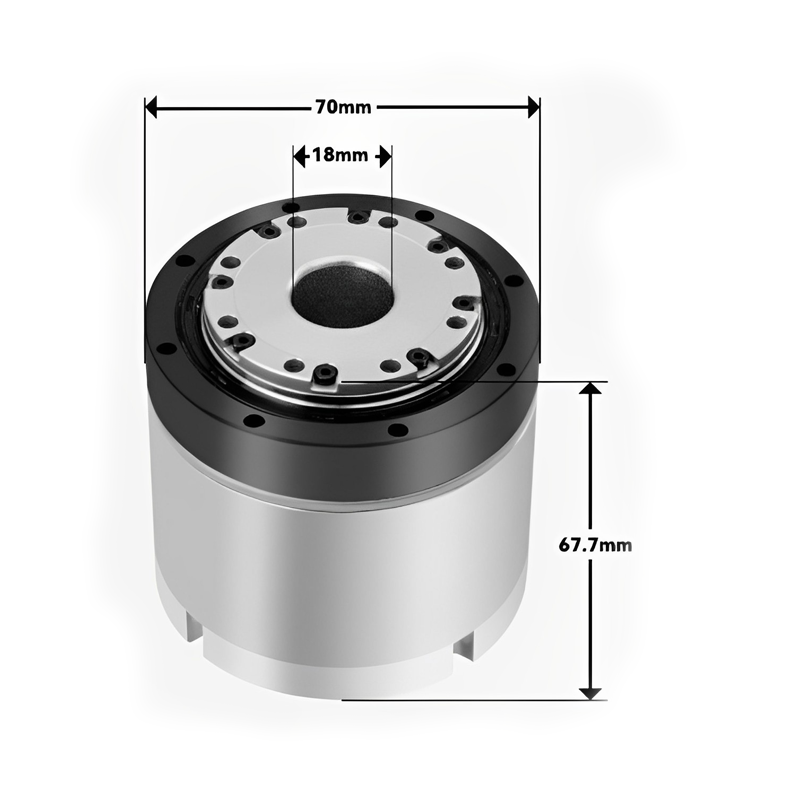
Konstruiert mit einem dreiphasigen Stator und einem Permanentmagnetrotor.
Angetrieben durch Wechselstrom, der das Magnetfeld rotiert und so den Rotor dreht.
Für die Regelung mit geschlossenem Regelkreis ist eine Positionsrückmeldung erforderlich.
Behält das Drehmoment über den gesamten Drehzahlbereich konstant bei.
Präzise steuerbare Geschwindigkeit, Position und Drehmoment.
Zu den Nachteilen zählen höhere Kosten und Komplexität.
Servos sind ideal für Anwendungen, die hohe Geschwindigkeiten, dynamische Bewegungen und Drehmomentanpassung erfordern. Ihre präzise Steuerung ermöglicht komplexe Bewegungsprofile.
Auswahl zwischen Schrittmotor und Servo
Berücksichtigen Sie die Drehmomentanforderungen bei Zielgeschwindigkeiten.
Schrittmotoren eignen sich am besten für niedrige Geschwindigkeiten und hohe Präzisionsanforderungen. Servomotoren eignen sich am besten für hohe Geschwindigkeiten bei gleichbleibendem Drehmoment.
Servo wird für wechselnde Lasten empfohlen, Schrittmotor ist besser für konstante Lasten.
Der Schrittmotor bietet Haltedrehmoment bei Nulldrehzahl, der Servo muss gebremst werden.
Servos sind teurer, Schrittmotoren einfacher und kostengünstiger.
Wenn Sie diese wesentlichen Unterschiede verstehen, können Sie bestimmen, ob ein Schritt- oder ein Servomotor für die Anforderungen Ihrer Automatisierungsanwendung am besten geeignet ist.