
Übergang von der Hollywood-Darstellung automatisierter Maschinen, von Charakteren wie Bruce Dern in Lautlos im Weltraum, Arnold Schwarzenegger in der Terminator-Reihe und Will Smith in I, Robot
Wir erleben derzeit das Aufkommen realer Maschinen, die verschiedene Branchen revolutionieren werden. Im Gegensatz zu ihren fiktiven Gegenstücken sind diese Maschinen dazu konzipiert, praktische Zwecke zu erfüllen und die menschlichen Fähigkeiten zu erweitern, anstatt uns zu unterdrücken. Mit einem zunehmenden Zustrom intelligenter mobiler Maschinen auf dem Markt, die speziell dafür entwickelt wurden, Menschen bei einer Vielzahl von Aufgaben zu unterstützen oder sogar zu ersetzen.
Es überrascht nicht, dass Forscher der Universität Oxford voraussagen, dass in den nächsten zwei Jahrzehnten rund 47 Prozent der US-Arbeitsplätze automatisiert werden könnten. Um Ingenieuren bei der Auswahl geeigneter Antriebe für ihre automatisierten Fahrzeuge zu helfen, haben wir den folgenden umfassenden Leitfaden zusammengestellt.
Automatisierte Fahrzeuge: Das Leben einfacher machen
Die Konvergenz fortschrittlicher Technologien, darunter verbesserte Batterien, effiziente Motoren, GPS, RFID, Laser-Leitsysteme und leistungsstarke Mikrocontroller, hat den Weg für die Entwicklung immer leistungsfähigerer automatisierter Fahrzeuge geebnet.
Stationäre Roboter in der Fertigung gibt es zwar schon seit einiger Zeit, aber was die neuesten Entwicklungen auszeichnet, ist die Verfügbarkeit kleinerer, kostengünstiger mobiler Roboterfahrzeuge und Hilfsmaschinen. Diese Innovationen sind darauf ausgelegt, alltägliche, sich wiederholende, kostspielige und gefährliche Aufgaben zu übernehmen, die traditionell von Menschen ausgeführt werden. Einige Beispiele:
- Reinigung
- Heben
- Stapeln
- Karrenfahren
- Transportieren
- Bombenentschärfung
In Szenarien wie Lagervorgängen kann der Einsatz von Robotern zu erheblichen Produktivitätssteigerungen von über 800 Prozent führen. Diese deutliche Verbesserung ist auf die Fähigkeit der Roboter zurückzuführen, sich schnell und ohne Ermüdung zu bewegen, und auf die Eliminierung menschlicher Fehler durch automatisierte Systeme.
Elektromotoren: Antrieb für automatisierte Fahrzeuge
Bei elektrisch betriebenen Fahrzeugen hängt ihre Fortbewegungsfähigkeit von der Nutzung eines Elektromotors ab, der normalerweise über ein Getriebe mit einem oder mehreren Antriebsrädern oder -ketten verbunden ist. Diese Fahrzeuge nutzen hauptsächlich Batterien als Energiequelle und einige sind so intelligent, dass sie bei Bedarf selbstständig nach Ladestationen suchen.
Der Markt für solche Fahrzeuge wächst stetig. Bis 2019 wird für den weltweiten Sektor der mobilen Robotik ein Wachstum von 12,6 Prozent prognostiziert. Dieses Wachstum ist auf eine Kombination aus technologischem Fortschritt und der zunehmenden Vorliebe der Branchenmanagementteams für umweltbewusste und effiziente Vorgehensweisen zurückzuführen.
Zur Beschreibung dieser Fahrzeuge werden verschiedene Begriffe verwendet, darunter:
- AGVs (Automated Guided Vehicles)
- AGCs (Automatisierte Transportwagen)
- Stückgutfahrzeuge
- Elektrokarren
- Schlepper
- Drücker
Unabhängig von der verwendeten Nomenklatur weisen diese Fahrzeuge gemeinsame Merkmale auf: Mobilität, Intelligenz (in vielen Fällen), Teil- oder Vollautonomie und häufig Elektroantrieb.
Fahrzeuglasten und Antriebssysteme verstehen
Der Markt für Fahrzeuge, die für Lasten bis zu 4.500 kg ausgelegt sind, übersteigt derzeit $750 Millionen. Wenn wir den Markt jedoch nach Ladekapazität eingrenzen, haben frühere Studien Ladeeinheitenfahrzeuge mit 4.500 kg und darunter getrennt, während die schwereren Lasten den Gabelstaplerherstellern überlassen wurden.
In dieser Diskussion konzentrieren wir uns auf Fahrzeuge, die speziell für die Handhabung von Lasten bis zu 10.000 lbs. (4.500 kg) ausgelegt sind. Die Komplexität dieser Maschinen variiert, von einfachen Materialtransportrobotern, die weniger als $1.000 kosten können, bis hin zu vollautomatischen AGVs mit programmierbaren Funktionen, die $50.000 übersteigen können. Doch selbst innerhalb dieses Lastbereichs ist ein Bereich von 100 lbs. (45 kg) bis 10.000 lbs. (4.500 kg) angesichts der vielfältigen Arbeitslasten, die normalerweise von einem oder wenigen Menschen bewältigt werden, zu weit gefasst.
Aufgaben wie der Transport von Baumaterialien, die Handhabung von Produkten im Lager, der Transport und die Handhabung von Krankenhauspatienten, die Lieferung von Mahlzeiten/Wäsche/Medikamenten und der Transport schwerer Diagnosegeräte liegen im Allgemeinen im Rahmen der Ladekapazität von Fahrzeugen mit einer Tragfähigkeit von bis zu ca. 900 kg.
In dieser Lastklasse beschäftigen wir uns mit elektrisch betriebenen Fahrzeugen und untersuchen dabei insbesondere die darin eingesetzten Antriebssysteme, einschließlich vollintegrierter Traktionsantriebe.
Auswahl des geeigneten Designs für den Antrieb von Elektrofahrzeugen
Bei der Konstruktion des Antriebs für Elektrofahrzeuge müssen zwei grundlegende Ansätze berücksichtigt werden.
In-Wheel-Designs
Radnabenantriebe wurden erstmals vor über einem Jahrhundert für Automobile eingeführt. Jüngste technologische Fortschritte haben diese Antriebe zu einer praktikablen Option für Anwendungen gemacht, die eine kompakte und geräuscharme Lösung erfordern. Bei dieser Konstruktion wird ein Elektromotor in die Felge eines Fahrzeugs eingebaut.
Die rotierende Komponente des Motors ist direkt in die Felge integriert und überträgt das Drehmoment direkt auf das Rad. Da es keinen mechanischen Vorteil durch das Getriebe gibt, müssen diese Motoren höhere Drehmomente bei relativ niedrigeren Drehzahlen erzeugen. Ohne entsprechendes Design kann die Effizienz von Direktantriebslösungen im Rad innerhalb des typischen Betriebsbereichs suboptimal sein.
In Radnabenkonstruktionen werden aufgrund ihrer Vorteile häufig Drehmomentmotoren verwendet. Sie bestehen im Vergleich zu anderen Lösungen aus weniger Komponenten, da sie keine Getriebe benötigen und somit den Leistungsverlust im Getriebe minimieren.
Zu den Vorteilen der In-Wheel-Konstruktion gehören:

- Erzielung eines Wirkungsgrades von über 80%, was für batteriebetriebene Fahrzeuge von entscheidender Bedeutung ist.
- Ermöglicht kompaktere und platzsparendere Designs im Vergleich zu alternativen Ansätzen.
- Bietet dank Direktantriebsdesign die beste Lösung für geringe Geräuschentwicklung.
Direktantriebe in Radnaben sind jedoch nach wie vor mit Herausforderungen verbunden. Die erforderlichen Motoren mit hohem Drehmoment sind im Allgemeinen teurer als herkömmliche Elektromotoren und können sogar teurer sein als eine Motor-Antriebsstrang-Kombination mit gleicher Leistung. Da der Radnabenmotor außerdem denselben Umgebungsbedingungen ausgesetzt ist wie das Rad selbst, müssen während des Entwicklungsprozesses entsprechende Schutzmaßnahmen getroffen werden.
Off-Wheel-Designs
Radunabhängige Konstruktionen, bei denen ein oder mehrere Elektromotoren die Kraft über einen Antriebsstrang auf die Antriebsräder übertragen, sind derzeit weiter verbreitet als Radunabhängige Konstruktionen. Häufig verwendete Antriebsstränge umfassen Riemen- und Riemenscheibensysteme, Ketten- und Kettenradmechanismen sowie verschiedene Arten von Getrieben. Einige Konstruktionen beinhalten sogar eine Kombination dieser Übertragungsmethoden.
Der mechanische Vorteil des Antriebsstrangs verringert das erforderliche Drehmoment des Motors und erhöht gleichzeitig dessen Drehzahl. Dies ermöglicht die Nutzung eines kostengünstigeren Elektromotors, obwohl die Einsparungen durch die mit dem Antriebsstrang verbundenen Kosten ausgeglichen werden können, wenn man radunabhängige Lösungen mit Getriebe mit Radnaben-Alternativen mit Direktantrieb vergleicht.
Off-Wheel-Designs bieten gegenüber In-Wheel-Designs mehrere Vorteile:
- Mehr Flexibilität bei Paketgröße und -konfiguration, da keine Platzbeschränkungen durch In-Wheel-Designs bestehen.
- Die Möglichkeit, Räder mit kleinerem Durchmesser zu verwenden, im Gegensatz zu Direktantriebsmotoren, bei denen die Radgröße normalerweise anhand ihrer Abmessungen vorgegeben ist.
- Einfache Integration von Zubehör wie Encodern, Haltebremsen und integrierten elektronischen Antrieben in radunabhängige Motoren.
- Schutz für Motor, Elektronik und Antriebsstrang vor rauen Umgebungsbedingungen durch den Fahrzeugrahmen.
Allerdings weisen Off-Wheel-Designs im Vergleich zu In-Wheel-Designs bestimmte Nachteile auf:
- Geringere Effizienz im Vergleich zu Radnabenkonstruktionen.
- Verringerte Zuverlässigkeit und erhöhte Geräuschentwicklung aufgrund der im Vergleich zu Radnabenlösungen zusätzlichen Komplexität des Getriebes.
So dimensionieren Sie einen Radantrieb für verschiedene Anwendungen

Abbildung 1 zeigt das erforderliche Drehmoment und die erforderliche Leistung für einen 8-Zoll-WheelMax, der auf einer typischen ebenen Fläche mit verschiedenen Lasten betrieben wird. Bei der Dimensionierung eines Radantriebs für eine Anwendung müssen mehrere Aspekte berücksichtigt werden:
- Gesamtgewicht und Anzahl der Antriebsräder: Bestimmen Sie das Gesamtgewicht des beladenen Fahrzeugs und die Anzahl der Antriebsräder. Die von jedem Radantrieb zu bewältigende Last entspricht ungefähr dem Gesamtgewicht geteilt durch die Anzahl der Antriebsräder. Wenn zusätzliche nicht angetriebene Lenkrollen vorhanden sind, muss jeder Radantrieb eine geringere normale Last bewältigen, erfährt aber bei der Beschleunigung immer noch die gleiche Trägheitsmasse.
- Beschleunigungsdrehmoment: Das vom Rad gelieferte Drehmoment zur Beschleunigung muss möglicherweise um ein Vielfaches höher sein als das Drehmoment, das zum Halten der Geschwindigkeit oder zum Erklimmen von Rampen erforderlich ist. Bedenken Sie, dass die Nennleistung eines Radantriebs von anderen Betriebsbedingungen abhängt, z. B. von den zu bewältigenden Steigungswinkeln.
- Raddurchmesser: Der Durchmesser des Radantriebs beeinflusst das erforderliche Drehmoment und die Geschwindigkeit, um die gewünschte Fahrzeugleistung zu erreichen. Größere Raddurchmesser können erforderlich sein, um die Anforderungen an Bodenfreiheit und Geschwindigkeit zu erfüllen, und sie können für eine ruhigere Fahrt auf unebenen Oberflächen sorgen. Sie erfordern jedoch auch ein höheres Motordrehmoment.
- Motordrehzahl und -leistung: Räder mit größerem Durchmesser erfordern eine geringere Motordrehzahl und -leistung. Abbildung 1 zeigt beispielsweise den Drehmoment- und Leistungsbedarf für den Antrieb eines 8-Zoll-Rads auf einer ebenen Fläche bei verschiedenen Lasten.
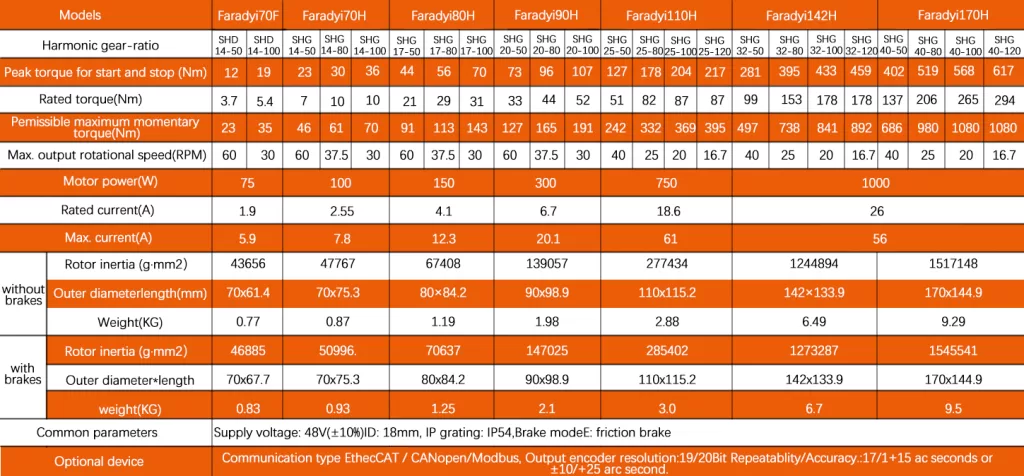
Der Faradyi90HXXI: Das Beste Ihrer Wahl
Faradyi Motors hat den Faradyi90HXXI, ein neuer elektrischer Radantrieb, der die Vorteile eines Direktantriebs im Rad mit einem Off-Wheel-Design kombiniert. Die ersten verfügbaren Modelle sind der Faradyi90I 2D Und Faradyi90I 3D.
Diese Radantriebe verfügen über eine Bürstenloser Faradyi-Gleichstrommotor Die Verbindung zum Rad erfolgt über ein effizientes, zweistufiges, schrägverzahntes Planetengetriebe, das in das Gehäuse des Radantriebs integriert ist. Die Baugruppe umfasst eine Montagehalterung und einen sechs oder acht Zoll großen Urethanreifen.
Das Getriebedesign und die Geometrie des Faradyi90HXXI wurden optimiert, um Geräusche und Vibrationen zu reduzieren und die Lebensdauer des Getriebes zu verbessern. Diese Einheiten wurden unter erhöhten Temperaturen und starken Not-Aus-Bedingungen getestet und übertrafen alle Erwartungen.
Der integrierte bürstenlose EnduraMax-Motor im Faradyi90HXXI verfügt über einen elektronischen Antrieb zum Antrieb des Motors und zur Steuerung einer Haltebremse, falls vorhanden. Der bürstenlose Motor macht einen regelmäßigen Bürstenwechsel überflüssig.

Tabelle 1 bietet einen Überblick über die GWM-Reihe von Radantrieben, einschließlich Nenntragfähigkeit, Reifendurchmesser, Nennraddrehzahl, Wicklungsspannung, Nennausgangsdrehmoment und Nennausgangsleistung.
Auswahl des richtigen Radantriebs für Ihr Fahrzeug
Um den idealen Allradantrieb für Ihr Fahrzeug auszuwählen, ist eine umfassende Analyse der erforderlichen Leistung erforderlich. Dabei müssen das maximale Drehmoment für die Beschleunigung und die durchschnittliche Leistung für typische Fahrroutinen berücksichtigt werden. Berücksichtigen Sie außerdem das Gelände, auf dem das Fahrzeug fahren wird. Fahrzeuge, die steile Steigungen bewältigen oder auf Oberflächen mit hohem Rollwiderstand wie Teppich fahren, benötigen einen Motor mit höherer Drehmomentkapazität.
Aufgrund der unterschiedlichen Anforderungen verschiedener Fahrzeuge unterstützt Faradyi Motors seine Kunden bei der Analyse ihrer spezifischen Anwendungen, um sicherzustellen, dass alle Betriebsbedingungen angemessen berücksichtigt und erfüllt werden.
Haben Sie Fragen zu Faradyi-Motoren? Kontaktiere uns oder E-Mail mit Adresse: [email protected]




