6 Kriterien zur Auswahl des richtigen Motors für einen Gelenkarmroboter

Die Auswahl der richtigen Motoren für einen kollaborativen Roboter für Forschung und Ausbildung ist in der Tat entscheidend für die Erzielung präziser und effizienter Bewegungen. Hier sind einige wichtige Kriterien, die bei der Auswahl von Motoren für einen solchen Roboter zu berücksichtigen sind
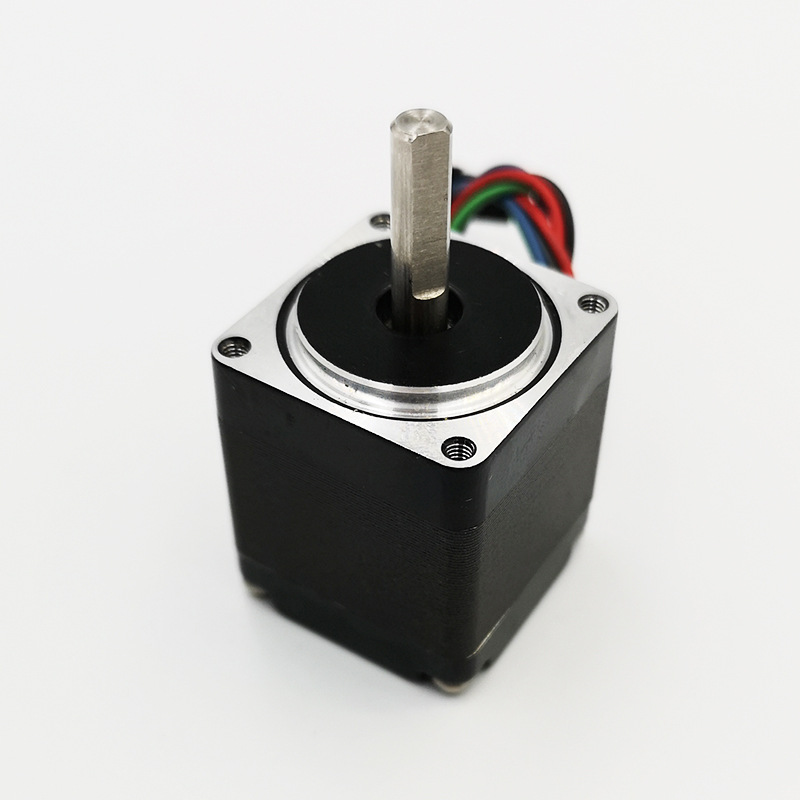
1. Leistung und Drehmoment
- Bestimmen Sie das maximale Gewicht, das der Roboter bewältigen muss. Wählen Sie einen Motor, der mindestens diese Nutzlastkapazität mit etwas Spielraum für Sicherheit und zukünftige Erweiterungen bewältigen kann.
- Je höher das Übersetzungsverhältnis des Untersetzungsgetriebes, desto höher die maximale Beschleunigung des Motors.
2. Maximale Beschleunigung
- Das Drehmoment ist die Drehkraft, die der Motor erzeugt. Motoren mit höherem Drehmoment können schwerere Lasten bewältigen und bieten bei anspruchsvollen Aufgaben eine bessere Leistung. Berücksichtigen Sie die Drehmomentanforderungen je nach Gewicht und Art der Objekte, mit denen der Roboter interagieren wird.
3. Präzision und Genauigkeit

- Für Forschungs- und Ausbildungszwecke sind präzise und genaue Bewegungen unerlässlich. Motoren mit hoher Präzision und geringem Spiel sorgen dafür, dass der Roboter Aufgaben zuverlässig wiederholen kann.
4.Energie-Effizienz
- Energieeffiziente Motoren tragen dazu bei, die Akkulaufzeit des Roboters zu verlängern und die Aufladehäufigkeit während des Betriebs zu verringern.
5.Sicherheitsvorrichtungen
- Kollaborative Roboter arbeiten in unmittelbarer Nähe von Menschen, daher ist Sicherheit von entscheidender Bedeutung. Achten Sie auf Motoren mit integrierten Sicherheitsfunktionen wie Strombegrenzung und Wärmeschutz, um Überhitzung und potenzielle Gefahren zu vermeiden.
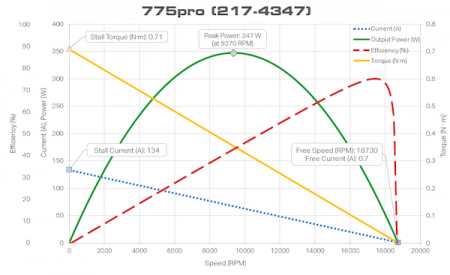
6.Geschwindigkeit
- Die Geschwindigkeit der Motoren beeinflusst die Bewegungsfähigkeiten des Roboters. Je nach Anwendung müssen Sie möglicherweise zwischen Hochgeschwindigkeitsbewegungen für schnelle Aktionen oder langsameren Geschwindigkeiten für präzisere Aufgaben abwägen.
- Während industrielle Roboterarme oft hohe Geschwindigkeiten erfordern, Diejenigen, die für den Bildungsbereich konzipiert sind, haben normalerweise geringere Geschwindigkeitsanforderungen. Jedoch, ein Motor mit Hochgeschwindigkeitsfähigkeit kann in bestimmten Anwendungen immer noch von Vorteil sein, beispielsweise wenn der Roboter schnelle Bewegungen ausführen muss oder wenn eine höhere Betriebsfrequenz erforderlich ist nach dem Robotereinsatz cases.
- Die Geschwindigkeit eines Lernarmroboters hängt von seinem Verwendungszweck ab, aber im Allgemeinen ein Getriebemotor mit einem Drehzahlbereich von 10-100 U/min ist für die meisten Anwendungen ausreichend. Der Motor sollte außerdem in der Lage sein, über den gesamten Bewegungsbereich eine konstante Geschwindigkeit aufrechtzuerhalten, um genaue und präzise Bewegungen zu gewährleisten.
7.Verfügbarkeit und Support
- Prüfen Sie die Verfügbarkeit von Ersatzteilen und technischen Support für die ausgewählten Motoren. Der Zugriff auf Ersatzteile und zuverlässigen Support kann die Ausfallzeiten bei Problemen erheblich verkürzen.