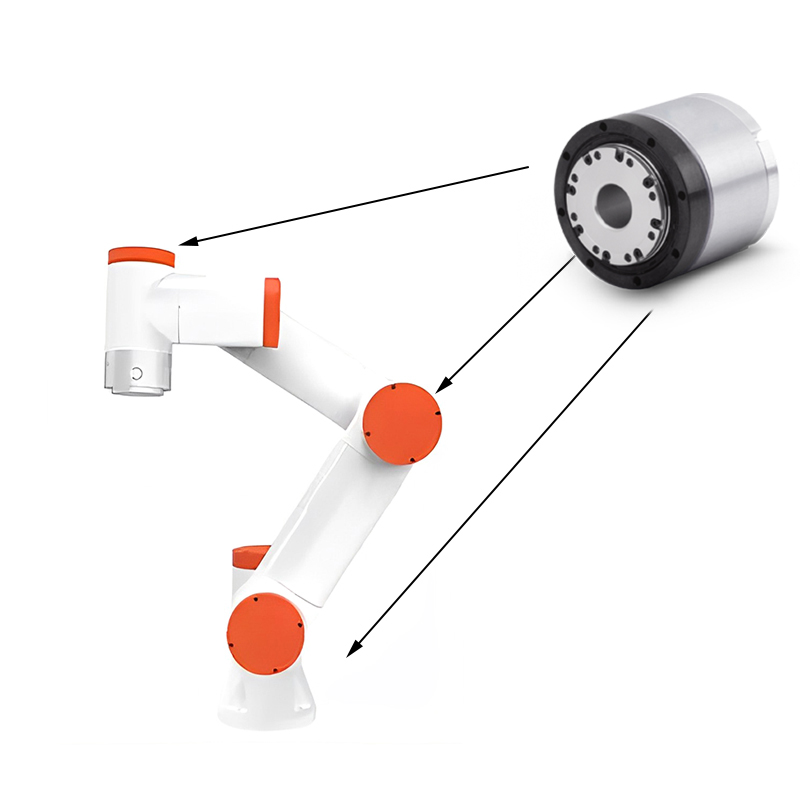
Un motor de módulo de articulación robótica es un tipo de motor diseñado específicamente para usarse en aplicaciones de articulación robótica. Estos motores se utilizan para controlar el movimiento de brazos robóticos y otros tipos de articulaciones robóticas.
Existen varios tipos de motores que se pueden utilizar como motores de módulo de articulación de robot, incluidos servomotores, motores paso a paso, motores de engranajes de CC, motores sin escobillas, actuadores lineales, servomotores de CA y motores de accionamiento armónico. Cada uno de estos tipos de motores tiene su propio conjunto de fortalezas y debilidades, y la elección del motor dependerá de los requisitos específicos de la aplicación de articulación robótica.
Los motores del módulo de articulación del robot son componentes críticos de los sistemas robóticos, ya que son responsables de controlar con precisión el movimiento de las articulaciones del robot. Sin un control del motor fiable y preciso, un brazo robótico u otro mecanismo robótico articulado no podría realizar las tareas previstas.
Además de su uso en robótica, los motores de módulos de articulación de robot también se pueden usar en otras aplicaciones donde se requiere un control de motor preciso y confiable, como en automatización industrial o dispositivos médicos.