6 criterios para elegir el motor adecuado para un robot de brazo articulado

Seleccionar los motores adecuados para un robot colaborativo dedicado a la investigación y la educación es crucial para lograr movimientos precisos y eficientes. A continuación se presentan algunos criterios clave a considerar al elegir motores para un robot de este tipo.
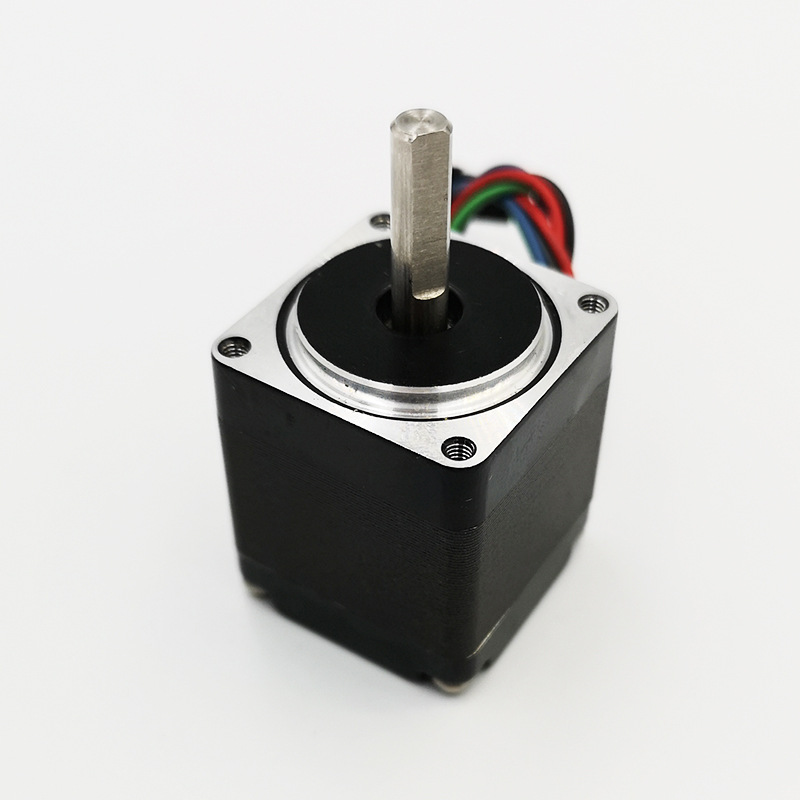
1. Potencia y par
- Determine el peso máximo que debe soportar el robot. Elija un motor que pueda manejar al menos esta capacidad de carga útil con cierto margen de seguridad y expansión futura.
- Cuanto mayor sea la relación de transmisión del reductor, mayor será la aceleración máxima del motor.
2. Aceleración máxima
- El par es la fuerza de rotación proporcionada por el motor. Los motores de mayor torque pueden manejar cargas más pesadas y ofrecer un mejor rendimiento en tareas desafiantes. Considere los requisitos de torsión según el peso y el tipo de objetos con los que interactuará el robot.
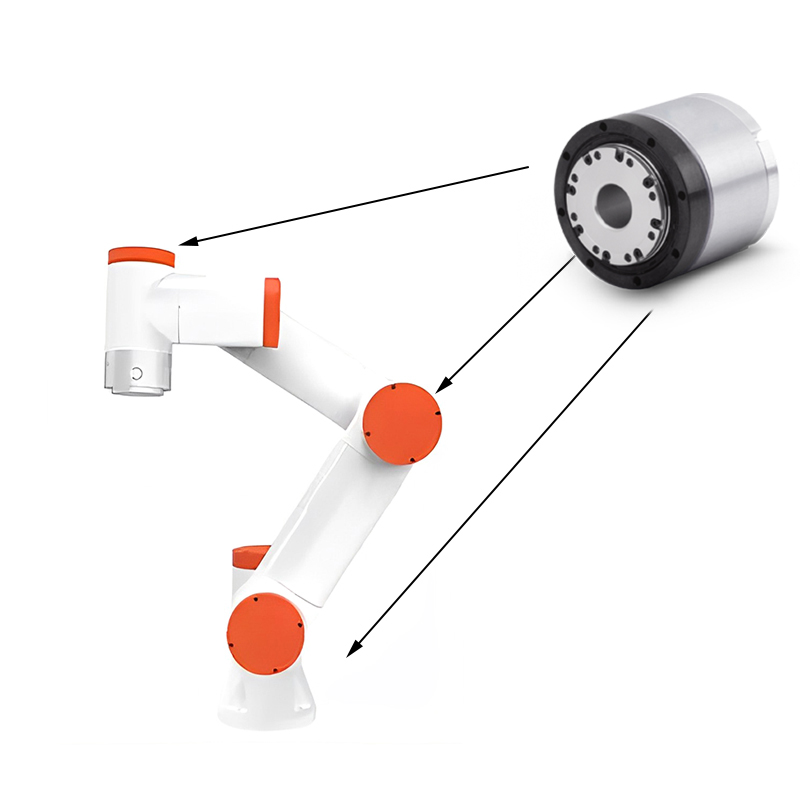
3. Precisión y exactitud

- Para fines educativos y de investigación, los movimientos precisos y exactos son esenciales. Los motores con alta precisión y bajo juego garantizarán que el robot pueda repetir las tareas de manera confiable.
4.Eficiencia energetica
- Los motores de bajo consumo ayudarán a prolongar la vida útil de la batería del robot, reduciendo la frecuencia de recargas durante el funcionamiento.
5.Caracteristicas de seguridad
- Los robots colaborativos trabajan muy cerca de los humanos, por lo que la seguridad es fundamental. Busque motores con características de seguridad incorporadas, como limitación de corriente y protección térmica, para evitar el sobrecalentamiento y posibles peligros.
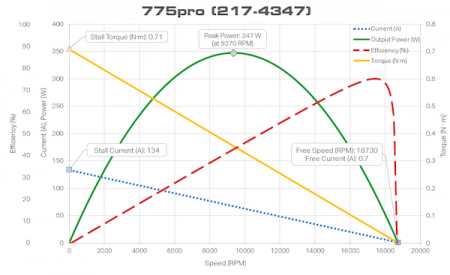
6.Velocidad
- La velocidad de los motores afectará las capacidades de movimiento del robot. Dependiendo de la aplicación, es posible que necesites equilibrar movimientos de alta velocidad para acciones rápidas o velocidades más lentas para tareas más precisas.
- Si bien los brazos robóticos industriales a menudo requieren capacidades de alta velocidad, los diseñados para la educación suelen tener requisitos de velocidad más bajos. Sin embargo, un motor con capacidad de alta velocidad Todavía puede ser beneficioso en ciertas aplicaciones, como cuando el robot necesita realizar movimientos rápidos. o cuando se requiere una frecuencia de operación más alta según el uso robótico cases.
- La velocidad de un brazo robótico educativo depende del uso previsto, pero en general, un motorreductor con un rango de velocidad de 10-100 RPM es suficiente para la mayoría de las aplicaciones. El motor también debe ser capaz de mantener una velocidad constante en todo su rango de movimiento, para garantizar movimientos exactos y precisos.
7.Disponibilidad y soporte
- Consultar disponibilidad de repuestos y soporte técnico para los motores elegidos. Tener acceso a repuestos y soporte confiable puede reducir significativamente el tiempo de inactividad en caso de cualquier problema.