Introducción
Los motores paso a paso convierten señales de impulsos eléctricos en desplazamientos angulares o lineales correspondientes. Con cada señal de pulso de entrada, el rotor gira un cierto ángulo o avanza un paso. El desplazamiento angular o lineal de salida es proporcional al número de pulsos de entrada y la velocidad es proporcional a la frecuencia del pulso. Por tanto, los motores paso a paso actúan como componentes que convierten los pulsos en desplazamientos angulares (o lineales).
Los motores paso a paso tienen un rotor y un estator distribuidos multipolares con devanados de control multifásicos conectados en estrella. Cada señal de pulso de entrada hace que el rotor del motor paso a paso avance un paso. Dado que la entrada es una señal de pulso, el desplazamiento angular de salida es discontinuo, de ahí el nombre "motor de pulso".
Con el desarrollo de sistemas de control digital, la aplicación de motores paso a paso se expandirá gradualmente. Los motores paso a paso vienen en varios tipos, incluidos reactivos, de excitación e híbridos, según su estructura, y se pueden clasificar en monofásicos, bifásicos y multifásicos según el número de fases.
Servomotor CC de bajo voltaje
Los servomotores de CC de bajo voltaje pueden entenderse como motores que siguen estrictamente los comandos de la señal de control: el rotor permanece estacionario hasta que se emite una señal de control; tras la emisión de la señal, el rotor gira inmediatamente; y cuando la señal de control desaparece, el rotor se detiene instantáneamente.
Los servomotores de CC de bajo voltaje son micromotores que se utilizan como componentes de accionamiento en dispositivos de control automático, convirtiendo señales eléctricas en desplazamientos angulares o velocidades angulares del eje. Sus características principales incluyen: ausencia de autorrotación cuando el voltaje de la señal es cero, disminución de la velocidad al aumentar el par y control altamente preciso de la velocidad y la posición.
La estructura básica de los servomotores CC de bajo voltaje es similar a la de los motores CC generales.
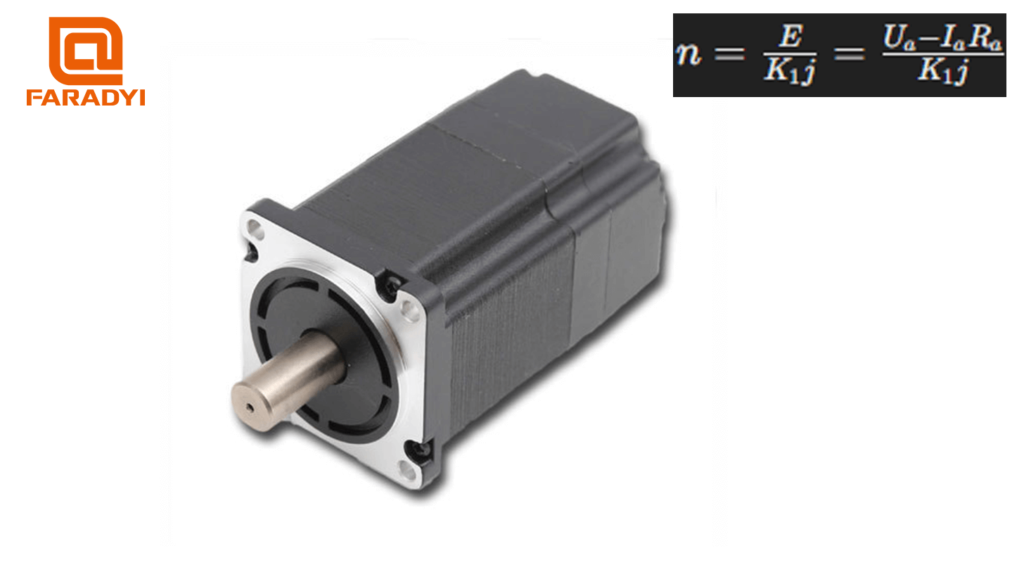
La velocidad del motor norte viene dada por la fórmula:
dónde mi es la fuerza electromotriz posterior de la armadura, k es una constante, j es el flujo por polo, Ua y, I a son el voltaje y la corriente del inducido, y Real academia de bellas artes es la resistencia de la armadura. Cambiando Ua o ϕ Puede controlar la velocidad del servomotor CC de bajo voltaje. Sin embargo, generalmente se adopta el método de controlar el voltaje del inducido. En los servomotores CC de imán permanente y baja tensión, el devanado de excitación se reemplaza por imanes permanentes, manteniendo el flujo magnético. ϕ constante. Los servomotores CC de bajo voltaje tienen buenas características de ajuste lineal y tiempos de respuesta rápidos.
Comparación de las características de rendimiento entre servomotores CC de bajo voltaje y motores paso a paso:
Si bien tanto los motores paso a paso como los servomotores de CC de bajo voltaje tienen similitudes en los métodos de control (trenes de impulsos y señales de dirección), existen diferencias significativas en su rendimiento y escenarios de aplicación. Comparemos sus características de rendimiento:
Diferencia en precisión de control:
-
- Número de fases en motores paso a paso: Esto se refiere al número de grupos de bobinas dentro del motor. Los motores paso a paso de uso común tienen configuraciones de dos, tres, cuatro y cinco fases. Diferentes números de fase corresponden a diferentes ángulos de paso. Por ejemplo, los motores bifásicos suelen tener ángulos de paso de 0,9°/1,8°, los motores trifásicos tienen 0,75°/1,5° y los motores cinco fases tienen 0,36°/0,72°. Cuando no hay un controlador subdividido, los usuarios eligen principalmente motores paso a paso con diferentes números de fase para cumplir con sus requisitos de ángulo de paso. Con un controlador subdividido, el "número de fase" deja de tener sentido, ya que los usuarios pueden cambiar el ángulo del paso cambiando el número de subdivisión en el controlador.
- Precisión de control de servomotores CC de bajo voltaje: De esto se encarga el codificador giratorio situado en el extremo posterior del eje del motor. Para motores equipados con codificadores estándar de 2500 líneas, debido al uso de tecnología de cuadruplicación por parte del controlador, el pulso equivalente es 360°10000=0,036°10000360°=0,036°. Para motores con codificadores de 17 bits, el controlador recibe 131.072 pulsos por revolución del motor, lo que resulta en un pulso equivalente a 360°131072=0,0027466°131072360°=0,0027466°, que es 1/655 del pulso equivalente de un motor paso a paso con un Ángulo de paso de 1,8°.
Diferencia en las características de baja frecuencia:
-
- Vibración de baja frecuencia en motores paso a paso: Los motores paso a paso son propensos a vibraciones de baja frecuencia a bajas velocidades. La frecuencia de vibración depende de las condiciones de carga y del rendimiento del conductor. La frecuencia de vibración suele ser la mitad de la frecuencia de arranque sin carga del motor. Esta vibración de baja frecuencia, determinada por el principio de funcionamiento de los motores paso a paso, es muy perjudicial para el funcionamiento normal de la máquina. Cuando los motores paso a paso funcionan a bajas velocidades, generalmente se emplean técnicas de amortiguación, como agregar amortiguadores al motor o usar tecnología de subdivisión en el controlador, para superar la vibración de baja frecuencia.
- Funcionamiento estable de servomotores CC de bajo voltaje: Los servomotores CC de bajo voltaje funcionan suavemente, sin vibraciones, incluso a bajas velocidades. Los servosistemas de CC de bajo voltaje cuentan con capacidades de supresión de resonancia, cubriendo deficiencias de rigidez mecánica. Además, el sistema cuenta con capacidades de análisis de frecuencia (FFT) internamente, capaces de detectar puntos de resonancia mecánica, facilitando los ajustes del sistema.
Diferencia en las características de par-frecuencia:
-
- Par de salida de motores paso a paso: El par de salida de los motores paso a paso disminuye al aumentar la velocidad y cae drásticamente a velocidades más altas. Por tanto, su velocidad máxima de funcionamiento suele estar entre 300 y 600 RPM.
- Salida de par constante de servomotores CC de bajo voltaje: Los servomotores de CC de bajo voltaje proporcionan una salida de par constante y pueden entregar un par nominal a velocidades superiores a la velocidad nominal, proporcionando una salida de potencia constante.
Diferencia en capacidad de sobrecarga:
Los motores paso a paso generalmente no tienen capacidad de sobrecarga. Los servomotores CC de bajo voltaje tienen una gran capacidad de sobrecarga.
Los servomotores de CC de bajo voltaje tienen capacidades de sobrecarga de velocidad y par. Su par máximo es tres veces el par nominal y se puede utilizar para superar el par de inercia de la carga en el arranque.
Los motores paso a paso carecen de esta capacidad de sobrecarga. Por lo tanto, para superar este par de inercia, a menudo se selecciona un motor paso a paso con un par mayor, lo que genera un desperdicio de par durante el funcionamiento normal de la máquina.
Diferencia en el desempeño operativo:
-
- Control de motores paso a paso: Los motores paso a paso funcionan bajo control de circuito abierto. Las altas frecuencias de arranque o las cargas excesivas pueden provocar que se omitan pasos o que el motor se cale. Al detenerse, la rotación a alta velocidad puede provocar un sobrepaso. Por lo tanto, para garantizar la precisión del control, los problemas de aceleración y desaceleración deben manejarse adecuadamente.
- Control de servosistemas CC de baja tensión: Los sistemas de servoaccionamiento de CC de bajo voltaje funcionan bajo control de circuito cerrado. El controlador puede muestrear directamente la señal de retroalimentación del codificador del motor, formando internamente un bucle de posición y un bucle de velocidad, evitando así los pasos perdidos o los fenómenos de exceso asociados con los motores paso a paso y garantizando un rendimiento de control más confiable.
Diferencia en el rendimiento de respuesta de velocidad:
-
- Motores paso a paso: Los motores paso a paso tardan entre 200 y 400 milisegundos en acelerar desde parado hasta la velocidad de funcionamiento (normalmente varios cientos de revoluciones por minuto).
- Servosistemas CC de bajo voltaje: Los servosistemas de CC de bajo voltaje tienen un excelente rendimiento de aceleración y solo requieren unos pocos milisegundos para acelerar desde parado hasta su velocidad nominal de 3000 RPM, lo que los hace adecuados para aplicaciones de control que requieren un arranque rápido.