

Existe una diferencia básica entre el control vectorial y el control de onda sinusoidal de los motores sin escobillas, que es la forma en que controlan la corriente de los motores sin escobillas. A medida que aumenta la velocidad del motor sin escobillas, el ancho de banda del controlador PI para el control de onda sinusoidal alcanzará el límite, lo que provocará una falla de control. Por el contrario, el control vectorial logra un control preciso de la corriente de la bobina del estator controlando directamente los componentes de la corriente vectorial en las direcciones paralela y perpendicular del campo magnético del rotor. Bajo control vectorial, el control de corriente ya no cambia con el tiempo, sino que se convierte en control de CC estático, eliminando así las limitaciones de la respuesta de frecuencia y la deriva de fase. Por lo tanto, la calidad actual en el modo de control vectorial no tiene nada que ver con la velocidad del motor.
En el caso del control vectorial, controlamos principalmente los componentes de la corriente y el voltaje del motor sin escobillas en las direcciones paralela y vertical del campo magnético del rotor. Esto significa que necesitamos calcular matemáticamente la corriente medida en el motor sin escobillas para convertirla de la estructura estática trifásica del estator a la estructura dinámica dq del rotor (paralela y perpendicular a la dirección del campo magnético del rotor). De manera similar, el voltaje de control en el extremo del motor sin escobillas también debe calcularse matemáticamente para convertirlo de la estructura dq del rotor a la estructura estática trifásica del estator, y luego ingresarse a la parte PWM para su modulación. Estas conversiones requieren capacidades de procesamiento matemático de alta velocidad, por lo que DSP y los procesadores de alto rendimiento se convierten en el núcleo del control vectorial.
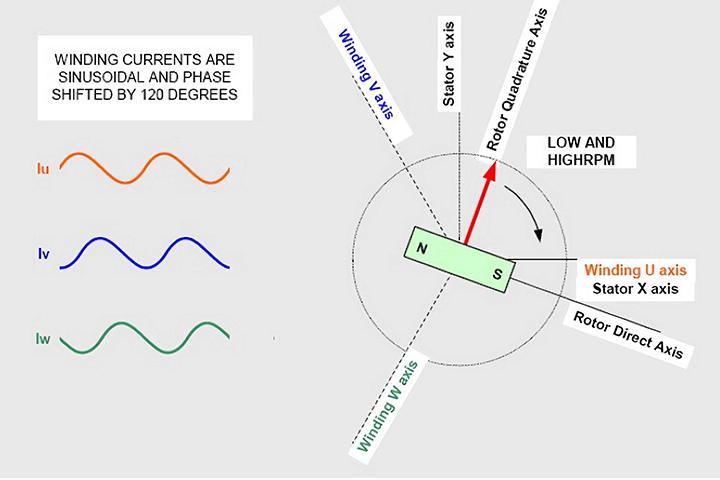
Aunque esta conversión se puede completar en un solo cálculo, para facilitar la descripción la dividimos en dos pasos. Primero, la corriente del motor cambia de la estructura física trifásica del estator con una diferencia de fase de 120 grados a una estructura dinámica estable dq ortogonal en ángulo recto, y luego convierte esta estructura dinámica del estator en una estructura estática trifásica. del rotor. Para garantizar resultados válidos, estos cálculos deben completarse dentro de un período de muestreo del controlador PI. La conversión anterior es lo opuesto a la operación de convertir la señal de voltaje requerida por el controlador PI de la estructura dq a la estructura trifásica de la bobina del estator.
Una vez que la corriente del motor sin escobillas se convierte en una estructura dq, el control se vuelve muy simple. Necesitamos dos controladores PI: uno para controlar la corriente paralela al campo magnético del rotor y otro para controlar la corriente perpendicular al campo magnético del rotor. Dado que la señal de control de la corriente paralela es cero, el componente de corriente paralela del motor sin escobillas también se vuelve cero, convirtiendo todos los vectores de corriente del motor sin escobillas en corriente vertical. Esto maximiza la eficiencia de los motores sin escobillas porque sólo la corriente vertical puede producir un par efectivo. Otro controlador PI se utiliza principalmente para controlar la corriente vertical para obtener el par requerido consistente con la señal de entrada. Esto asegura que la corriente vertical se controle según sea necesario para obtener el par requerido.
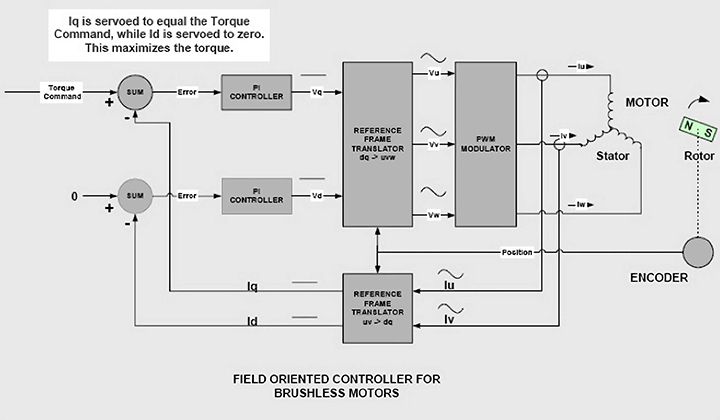
Las señales de salida de los dos controladores PI representan el vector de tensión del rotor. Estos vectores de voltaje estático se someten a una serie de conversiones de coordenadas de referencia para obtener las señales de control de voltaje requeridas para el puente de salida. Primero se convierten de la estructura de referencia dinámica dq del rotor a la estructura estática xy del estator. Luego, la señal de voltaje se convierte en estructuras físicas espaciadas 120 grados entre sí y finalmente se ingresa en las bobinas trifásicas U, V y W del motor sin escobillas. Estas tres señales de voltaje deben modularse mediante PWM antes de ingresar a la bobina del motor sin escobillas.
El trabajo de convertir las señales de corriente y voltaje sinusoidales variables en el tiempo en la bobina del motor sin escobillas en una señal de CC de estructura dq es la conversión de las coordenadas de referencia.
La diferencia esencial entre la conmutación de onda sinusoidal y el control vectorial radica en la forma en que se manejan la conversión de coordenadas y el control de corriente. En el método de conmutación de onda sinusoidal, primero realizamos la conmutación y luego obtenemos la corriente de onda sinusoidal requerida a través del control PI. Por lo tanto, el control PI del sistema procesa principalmente las señales sinusoidales variables en el tiempo de la corriente y el voltaje del motor sin escobillas, y el rendimiento del motor sin escobillas estará limitado por el ancho de banda del controlador y la deriva de fase. En el control vectorial, la señal actual primero es controlada por PI y luego se somete a un procesamiento de conmutación de alta velocidad. Por lo tanto, el controlador PI no necesita procesar señales de corriente y voltaje que varían en el tiempo, y el sistema no se verá afectado por el ancho de banda ni la deriva de fase del controlador PI.
Entonces, ¿por qué es superior el control de vectores?
El control vectorial hace que el motor se comporte con la misma suavidad a bajas velocidades que a altas velocidades. Por el contrario, la conmutación sinusoidal permite un funcionamiento suave a bajas velocidades pero da como resultado una reducción significativa de la eficiencia a altas velocidades. La conmutación de onda trapezoidal se comporta normalmente cuando el motor funciona a alta velocidad, pero provocará fluctuaciones de par a baja velocidad. Por lo tanto, el control de vectores se considera el mejor método de control para motores sin escobillas.










