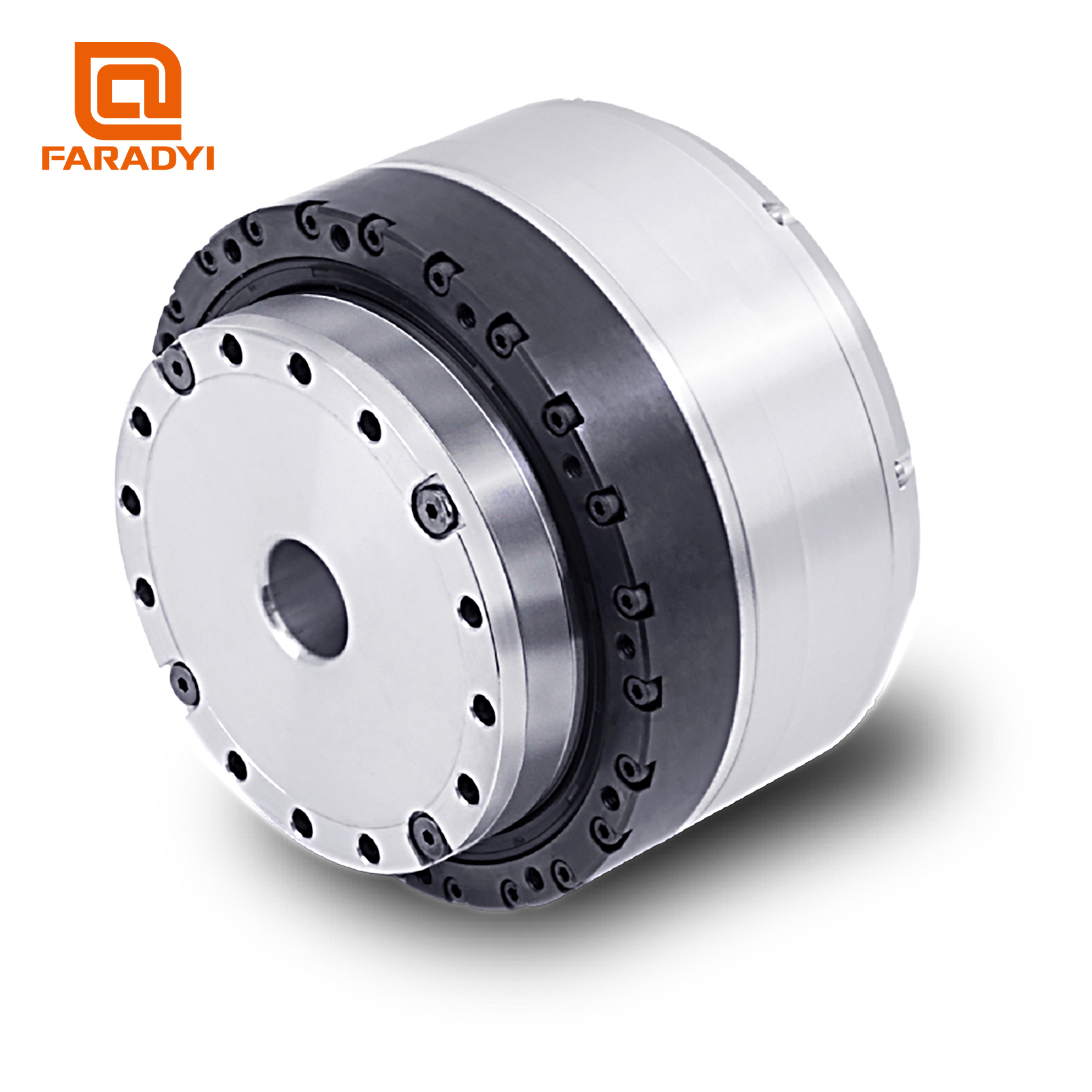
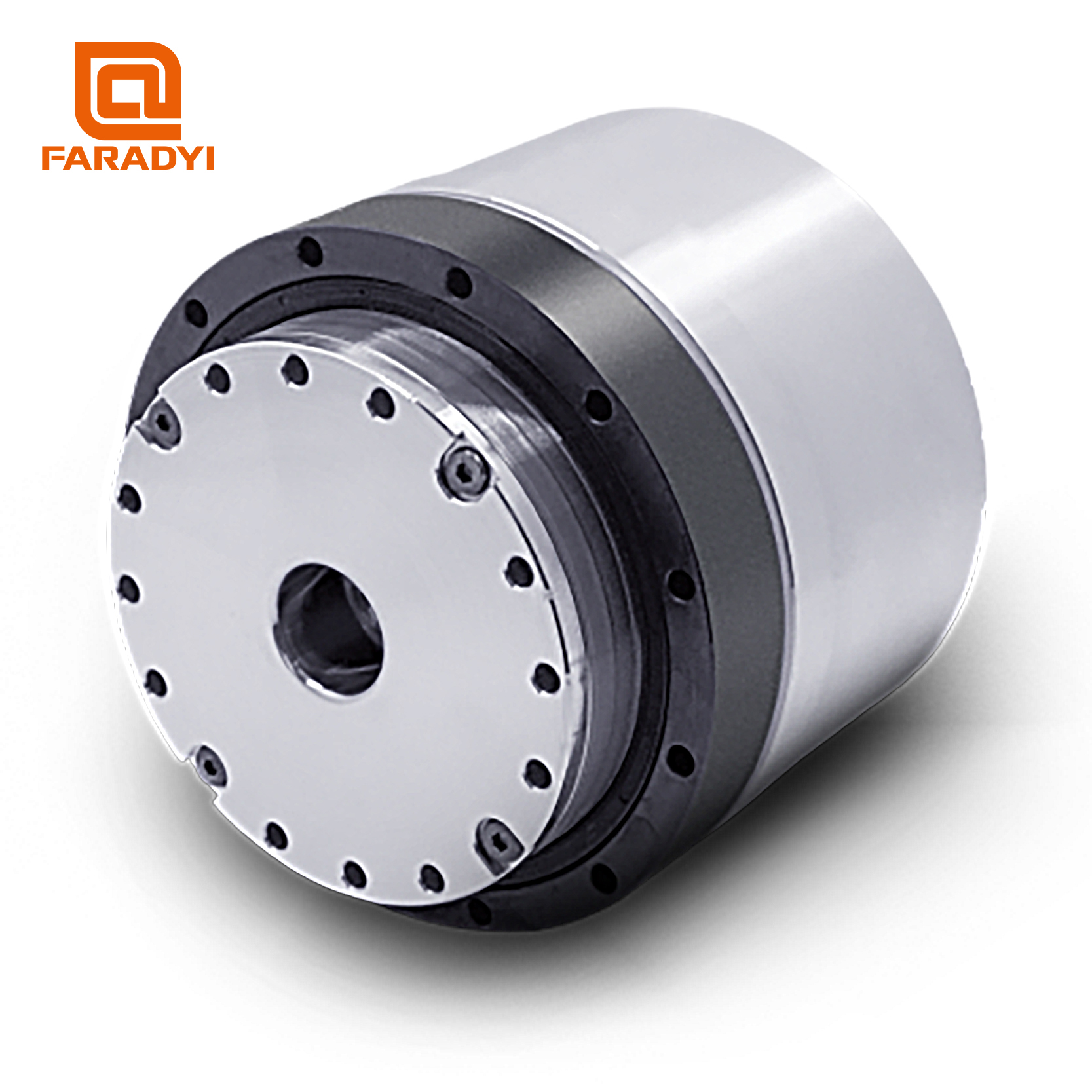
Un moteur de module d'articulation de robot est un type de moteur spécialement conçu pour être utilisé dans les applications d'articulation robotique. Ces moteurs sont utilisés pour contrôler le mouvement des bras robotiques et d’autres types d’articulations robotiques.
Il existe plusieurs types de moteurs qui peuvent être utilisés comme moteurs de module d'articulation de robot, notamment les servomoteurs, les moteurs pas à pas, les moteurs à engrenages CC, les moteurs sans balais, les actionneurs linéaires, les servomoteurs CA et les moteurs d'entraînement harmoniques. Chacun de ces types de moteurs possède ses propres forces et faiblesses, et le choix du moteur dépendra des exigences spécifiques de l’application de l’articulation robotique.
Les moteurs des modules d'articulation du robot sont des composants essentiels des systèmes robotiques, car ils sont responsables du contrôle précis du mouvement des articulations du robot. Sans une commande moteur fiable et précise, un bras robotique ou tout autre mécanisme robotique articulé serait incapable d’accomplir les tâches prévues.
En plus de leur utilisation en robotique, les moteurs de modules d'articulation de robot peuvent également être utilisés dans d'autres applications où un contrôle moteur précis et fiable est requis, comme dans l'automatisation industrielle ou les dispositifs médicaux.