
Transition de la représentation hollywoodienne des machines automatisées, de personnages comme Bruce Dern dans Silent Running, Arnold Schwarzenegger dans la série Terminator et Will Smith dans I Robot
Nous assistons désormais à l’émergence de machines réelles prêtes à révolutionner diverses industries. Contrairement à leurs homologues fictifs, ces machines sont conçues pour servir des objectifs pratiques et augmenter les capacités humaines plutôt que de nous asservir. Avec un afflux croissant de machines mobiles intelligentes sur le marché, spécialement conçues pour assister, voire remplacer les humains dans un large éventail de tâches.
Il n’est pas surprenant que des chercheurs de l’Université d’Oxford prédisent qu’environ 47 % des emplois aux États-Unis pourraient être automatisés au cours des deux prochaines décennies. Pour aider les ingénieurs dans la sélection des entraînements appropriés pour alimenter leurs véhicules automatisés, nous avons compilé le guide complet suivant.
Véhicules automatisés : simplifier la vie
La convergence de technologies avancées, notamment des batteries améliorées, des moteurs efficaces, le GPS, la RFID, les systèmes de guidage laser et de puissants microcontrôleurs, a ouvert la voie au développement de véhicules automatisés de plus en plus performants.
Bien que les robots fixes dans le secteur manufacturier existent depuis un certain temps, ce qui distingue les dernières avancées est la disponibilité de véhicules robotiques mobiles et de machines d'assistance plus petits et plus rentables. Ces innovations sont conçues pour gérer les tâches banales, répétitives, coûteuses et dangereuses traditionnellement effectuées par les humains. Voici quelques exemples :
- Nettoyage
- Levage
- Empilage
- Chariot
- Transport
- Déminage des bombes
Dans des scénarios tels que les opérations d’entrepôt, la mise en œuvre de robots peut entraîner des améliorations remarquables de la productivité, dépassant les 800 %. Cette amélioration significative peut être attribuée à la capacité des robots à se déplacer rapidement sans ressentir de fatigue, associée à l'élimination des erreurs humaines grâce aux systèmes automatisés.
Moteurs électriques : alimenter les véhicules automatisés
Lorsqu'il s'agit de véhicules électriques, leur capacité à se déplacer dépend de l'utilisation d'un moteur électrique, généralement connecté à une ou plusieurs roues motrices ou bandes de roulement via un train d'engrenages. Ces véhicules dépendent principalement des batteries comme source d’énergie, et certains possèdent l’intelligence nécessaire pour rechercher de manière autonome des stations de recharge en cas de besoin.
Le marché de ces véhicules est en constante expansion, le secteur mondial de la robotique mobile devant croître de 12,6 % d'ici 2019. Cette croissance peut être attribuée à une combinaison d'avancées technologiques et à la préférence croissante pour des pratiques efficaces et respectueuses de l'environnement adoptées par les équipes de direction de l'industrie. .
Différents termes sont utilisés pour décrire ces véhicules, notamment :
- AGV (véhicules à guidage automatique)
- AGC (chariots guidés automatisés)
- Véhicules unitaires
- Chariots électriques
- Remorqueurs
- Poussoirs
Quelle que soit la nomenclature utilisée, ces véhicules partagent des caractéristiques communes : mobilité, intelligence (dans de nombreux cas), semi-autonomie ou pleine autonomie, et souvent propulsion électrique.
Comprendre les charges des véhicules et les systèmes d'entraînement
Le marché des véhicules conçus pour supporter des charges allant jusqu'à 10 000 lb. (4 500 kg) dépasse actuellement $750 millions. Cependant, lorsque nous réduisons le marché en fonction de la capacité de charge, des études antérieures ont séparé les véhicules de charge unitaire à 10 000 lb. (4 500 kg) et moins, laissant les charges plus lourdes aux fabricants de chariots élévateurs.
Dans cette discussion, nous nous concentrons sur les véhicules spécialement conçus pour supporter des charges allant jusqu'à 10 000 lb. (4 500 kg). La complexité de ces machines varie, allant des simples robots de manutention pouvant coûter moins de 1 000 $ aux AGV entièrement automatisés dotés de capacités programmables pouvant dépasser $50 000. Cependant, même dans cette plage de charges, compte tenu des diverses charges de travail généralement gérées par un ou quelques humains, une plage de 100 lb. (45 kg) à 10 000 livres. (4 500 kg) est trop large.
Les tâches telles que le déplacement des matériaux de chantier, la manutention des produits en entrepôt, le transport et la manutention des patients hospitalisés, la livraison de repas/linge/médicaments et le déplacement d'équipements de diagnostic lourds relèvent généralement de la capacité de charge des véhicules évalués jusqu'à environ 2 000 lb. (900 kg).
Dans cette classe de charge, nous explorerons les véhicules électriques et examinerons spécifiquement les systèmes de propulsion qui y sont utilisés, y compris les systèmes de traction entièrement intégrés.
Choisir la conception appropriée pour la propulsion des véhicules électriques
Lorsqu’il s’agit de concevoir la propulsion d’un véhicule électrique, il existe deux approches principales à considérer.
Conceptions intégrées aux roues
Les systèmes de propulsion intégrés aux roues ont été introduits pour la première fois il y a plus d'un siècle pour les automobiles. Les progrès technologiques récents ont fait de ces variateurs une option réalisable pour les applications nécessitant une solution compacte et silencieuse. Cette conception consiste à placer un moteur électrique dans la jante d’un véhicule.
L'élément rotatif du moteur est directement intégré à la jante, délivrant le couple directement à la roue. Comme l’engrenage ne présente aucun avantage mécanique, ces moteurs doivent générer des niveaux de couple plus élevés à des vitesses relativement faibles. Sans une conception appropriée, l’efficacité des solutions à entraînement direct dans les roues peut être sous-optimale dans la plage de fonctionnement typique.
Les conceptions intégrées aux roues utilisent généralement des moteurs couple en raison de leurs avantages. Ils comportent moins de composants que d’autres solutions car ils éliminent le besoin de trains d’engrenages, minimisant ainsi la perte de puissance des engrenages.
Les avantages des conceptions intégrées aux roues incluent :

- Réaliser des efficacités supérieures à 80%, ce qui est crucial pour les véhicules alimentés par batterie.
- Permet des conceptions plus compactes et peu encombrantes par rapport aux approches alternatives.
- Offrant la meilleure solution pour un faible bruit audible grâce à la conception à entraînement direct.
Cependant, les solutions à entraînement direct et intégrées aux roues restent confrontées à des défis. Les moteurs à couple élevé requis sont généralement plus chers que les moteurs électriques traditionnels et peuvent même dépasser le coût d’une combinaison moteur et transmission offrant les mêmes performances. De plus, étant donné que le moteur intégré à la roue est exposé au même environnement que la roue elle-même, des mesures de protection adéquates doivent être prises pendant le processus d'ingénierie.
Conceptions hors roue
Les conceptions hors roues, qui impliquent un ou plusieurs moteurs électriques transmettant la puissance aux roues motrices via une transmission, sont actuellement plus répandues que les conceptions intégrées aux roues. Les transmissions couramment utilisées comprennent les systèmes à courroie et à poulies, les mécanismes à chaîne et à pignons, ainsi que divers types de boîtes de vitesses. Certaines conceptions intègrent même une combinaison de ces méthodes de transmission.
L'avantage mécanique de la transmission réduit le couple requis du moteur tout en augmentant sa vitesse proportionnellement. Cela permet l'utilisation d'un moteur électrique plus rentable, bien que les économies puissent être compensées par les dépenses associées à la transmission lorsque l'on compare les solutions sans engrenages avec les alternatives à entraînement direct dans les roues.
Les conceptions hors roue offrent plusieurs avantages par rapport aux conceptions avec roue :
- Plus de flexibilité dans la taille et la configuration de l'emballage en raison de l'absence de contraintes d'espace imposées par les conceptions en roue.
- La possibilité d'utiliser des roues de plus petit diamètre, par opposition aux moteurs à entraînement direct qui dictent généralement la taille des roues en fonction de leurs dimensions.
- Facilité d'intégration d'accessoires tels que des encodeurs, des freins de maintien et des entraînements électroniques intégrés dans les moteurs hors roue.
- Protection du moteur, de l'électronique et de la transmission contre les environnements difficiles assurée par le châssis du véhicule.
Cependant, les conceptions hors roue présentent certains inconvénients par rapport aux conceptions avec roue :
- Efficacité inférieure par rapport aux conceptions intégrées aux roues.
- Fiabilité réduite et bruit audible accru en raison de la complexité accrue des engrenages par rapport aux solutions intégrées aux roues.
Comment dimensionner une roue motrice pour les applications

La figure 1 affiche le couple et la puissance requis pour un WheelMax de huit pouces fonctionnant sur une surface plane typique sous diverses charges. Plusieurs considérations doivent être prises en compte lors du dimensionnement d'une roue motrice pour une application :
- Poids total et nombre de roues motrices : Déterminez le poids total du véhicule chargé et le nombre de roues motrices dont il disposera. La charge supportée par chaque roue motrice correspond approximativement au poids total divisé par le nombre de roues motrices. S'il y a des roulettes supplémentaires non motorisées, chaque roue motrice doit supporter une charge normale inférieure mais subira toujours la même masse d'inertie lors de l'accélération.
- Couple d'accélération : le couple délivré par la roue pour l'accélération peut devoir être plusieurs fois supérieur au couple requis pour maintenir la vitesse ou monter des rampes. Gardez à l’esprit que les performances nominales d’une roue motrice dépendent d’autres conditions de fonctionnement, telles que les angles d’inclinaison qui doivent être parcourus.
- Diamètre de la roue : le diamètre de la roue motrice influence le niveau de couple et la vitesse requis pour atteindre les performances souhaitées du véhicule. Des diamètres de roue plus grands peuvent être nécessaires pour répondre aux exigences de garde au sol et de vitesse, et ils peuvent permettre un déplacement plus fluide sur des surfaces rugueuses. Cependant, ils nécessitent également plus de couple moteur.
- Vitesse et puissance du moteur : Les roues de plus grand diamètre nécessitent moins de vitesse et de puissance du moteur. Par exemple, dans la figure 1, les exigences de couple et de puissance pour une roue motrice de huit pouces sur une surface plane sont représentées pour diverses charges.
Le Faradyi90HXXI: Le meilleur de votre option
Faradyi Motors a présenté le Faradyi90HXXI, une nouvelle transmission électrique à roues motorisées qui combine les avantages d'une conception à entraînement direct dans les roues tout en étant en réalité une conception hors roue. Les premiers modèles disponibles sont les Faradyi90I 2D et Faradyi90I 3D.
Ces roues motrices intègrent un Moteur à courant continu sans balais Faradyi relié à la roue via une boîte de vitesses épicycloïdale hélicoïdale efficace à deux étages intégrée dans le boîtier de la roue motrice. L'ensemble comprend un support de montage et un pneu en uréthane de six ou huit pouces.
La conception et la géométrie des engrenages du Faradyi90HXXI ont été optimisées pour réduire le bruit, les vibrations et améliorer la durée de vie des engrenages. Ces unités ont subi des tests dans des températures élevées et dans des conditions d'arrêt d'urgence à fort impact, dépassant les attentes.
Le moteur sans balais EnduraMax intégré au Faradyi90HXXI comprend un entraînement électronique pour alimenter le moteur et contrôler un frein de maintien, le cas échéant. Le moteur sans balais élimine le besoin de remplacer régulièrement les balais.

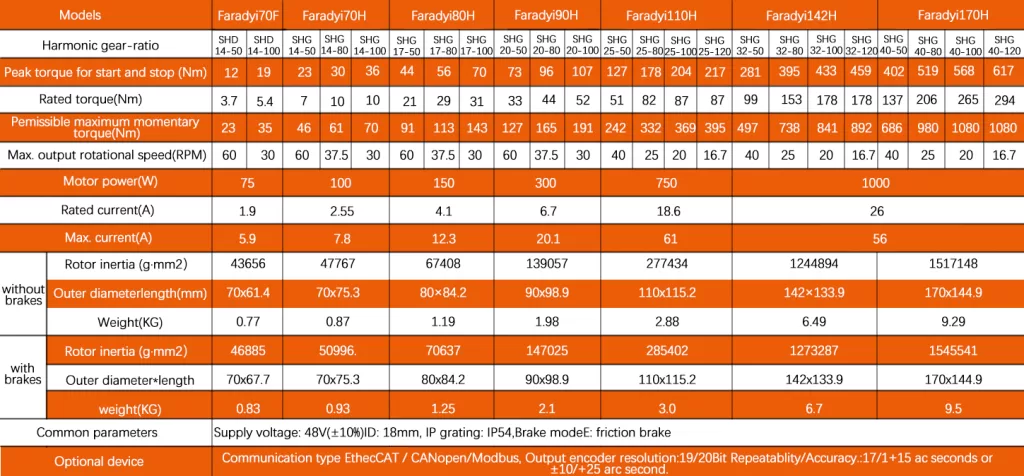
Le tableau 1 donne un aperçu de la gamme de roues motrices GWM, y compris la capacité de charge nominale, le diamètre du pneu, la vitesse nominale de la roue, la tension d'enroulement, le couple de sortie nominal et la puissance de sortie nominale.
Choisir la bonne roue motrice pour votre véhicule
Pour sélectionner la transmission idéale pour votre véhicule, une analyse complète de ses performances requises est nécessaire, en tenant compte du couple maximal pour l'accélération et de la puissance moyenne pour les déplacements typiques. De plus, tenez compte du terrain que le véhicule rencontrera. Les véhicules empruntant des pentes raides ou circulant sur des surfaces à haute résistance au roulement, comme la moquette, nécessiteront un moteur avec une plus grande capacité de couple.
En raison des exigences variables des différents véhicules, Faradyi Motors aide ses clients à analyser leurs applications spécifiques afin de garantir que toutes les conditions de fonctionnement sont correctement prises en compte et respectées.
Vous avez des questions sur les moteurs Faradyi, Contact ou par e-mail avec l'adresse : [email protected]




