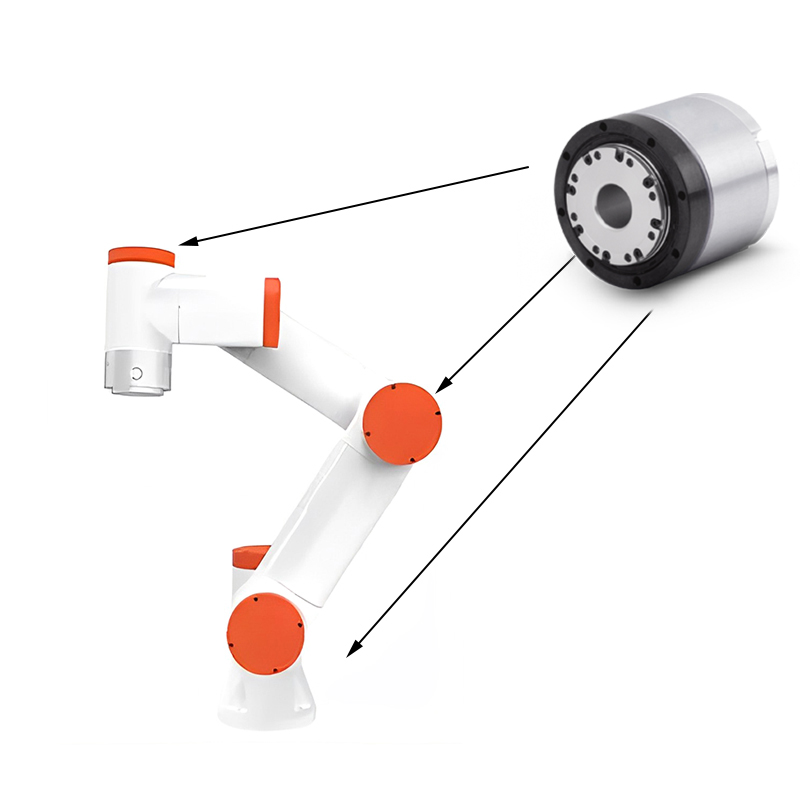
6 critères pour bien choisir son moteur pour un robot à bras articulé

Choisir les bons moteurs pour un robot collaboratif dédié à la recherche et à l’éducation est en effet crucial pour réaliser des mouvements précis et efficaces. Voici quelques critères clés à prendre en compte lors du choix des moteurs pour un tel robot
1. Puissance et couple
- Déterminez le poids maximum que le robot doit supporter. Choisissez un moteur capable de gérer au moins cette capacité de charge utile avec une certaine marge de sécurité et d'expansion future.
- Plus le rapport de démultiplication du réducteur est élevé, plus l'accélération maximale du moteur est élevée.
2. Accélération maximale
- Le couple est la force de rotation fournie par le moteur. Les moteurs à couple plus élevé peuvent supporter des charges plus lourdes et offrir de meilleures performances dans les tâches difficiles. Tenez compte des exigences de couple en fonction du poids et du type d'objets avec lesquels le robot interagira.
3. Précision et exactitude

- À des fins de recherche et d’éducation, des mouvements précis et exacts sont essentiels. Des moteurs de haute précision et à faible jeu garantiront que le robot peut répéter les tâches de manière fiable.
4.Efficacité énergétique
- Les moteurs économes en énergie contribueront à prolonger la durée de vie de la batterie du robot, réduisant ainsi la fréquence de recharge pendant le fonctionnement.
5.Des dispositifs de sécurité
- Les robots collaboratifs travaillent à proximité des humains, la sécurité est donc essentielle. Recherchez des moteurs dotés de fonctions de sécurité intégrées, telles qu'une limitation de courant et une protection thermique, pour éviter la surchauffe et les dangers potentiels.
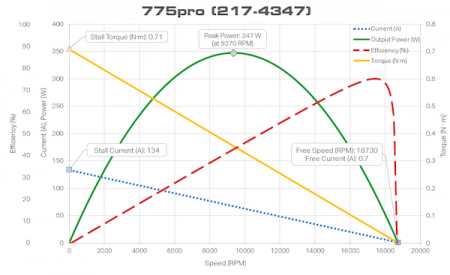
6.Vitesse
- La vitesse des moteurs affectera les capacités de mouvement du robot. Selon l'application, vous devrez peut-être équilibrer entre des mouvements à grande vitesse pour des actions rapides ou des vitesses plus lentes pour des tâches plus précises.
- Alors que les bras robotiques industriels nécessitent souvent des capacités à grande vitesse, ceux conçus pour l’éducation ont généralement des exigences de vitesse inférieures. Cependant, un moteur avec une capacité à grande vitesse peut encore être bénéfique dans certaines applications, comme lorsque le robot doit effectuer des mouvements rapides ou lorsqu'une fréquence de fonctionnement plus élevée est requise selon l'utilisation robotique cases.
- La vitesse d'un robot à bras éducatif dépend de son utilisation prévue, mais en général, un motoréducteur avec une plage de vitesse de 10 à 100 tr/min est suffisant pour la plupart des applications. Le moteur doit également être capable de maintenir une vitesse constante sur toute son amplitude de mouvement, pour garantir des mouvements précis et précis.
7.Disponibilité et assistance
- Vérifiez la disponibilité des pièces de rechange et du support technique pour les moteurs choisis. Avoir accès à des pièces de rechange et à une assistance fiable peut réduire considérablement les temps d'arrêt en cas de problème.