Introduction
Les moteurs pas à pas convertissent les signaux d'impulsions électriques en déplacements angulaires ou linéaires correspondants. Avec chaque signal d'impulsion d'entrée, le rotor tourne d'un certain angle ou avance d'un pas. Le déplacement angulaire ou linéaire de sortie est proportionnel au nombre d'impulsions d'entrée et la vitesse est proportionnelle à la fréquence d'impulsion. Par conséquent, les moteurs pas à pas agissent comme des composants qui convertissent les impulsions en déplacements angulaires (ou linéaires).
Les moteurs pas à pas ont un rotor et un stator distribués multipolaires avec des enroulements de commande multiphasés connectés en étoile. Chaque signal d'impulsion d'entrée fait avancer le rotor du moteur pas à pas d'un pas. Puisque l’entrée est un signal d’impulsion, le déplacement angulaire de sortie est discontinu, d’où le nom de « moteur à impulsions ».
Avec le développement des systèmes de contrôle numérique, l’application des moteurs pas à pas va progressivement s’étendre. Les moteurs pas à pas sont de différents types, notamment réactifs, à excitation et hybrides, en fonction de leur structure, et peuvent être classés en monophasés, biphasés et multiphasés en fonction du nombre de phases.
Servomoteur CC basse tension
Les servomoteurs CC basse tension peuvent être compris comme des moteurs qui suivent strictement les commandes du signal de commande : le rotor reste stationnaire jusqu'à ce qu'un signal de commande soit émis ; dès l'émission du signal, le rotor tourne immédiatement ; et lorsque le signal de commande disparaît, le rotor s'arrête instantanément.
Les servomoteurs CC basse tension sont des micromoteurs utilisés comme composants d'actionnement dans les dispositifs de contrôle automatique, convertissant les signaux électriques en déplacements angulaires ou vitesses angulaires de l'arbre. Leurs principales caractéristiques sont les suivantes : aucune auto-rotation lorsque la tension du signal est nulle, une diminution de la vitesse avec l'augmentation du couple et un contrôle très précis de la vitesse et de la position.
La structure de base des servomoteurs CC basse tension est similaire à celle des moteurs CC généraux.
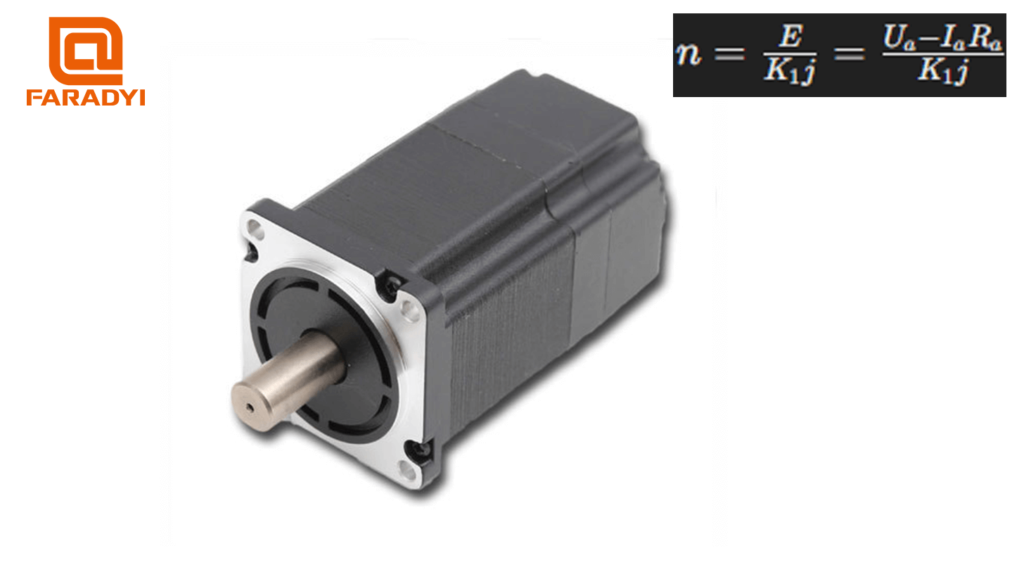
La vitesse du moteur n est donné par la formule :
où E est la force contre-électromotrice de l'armature, K est une constante, j est le flux par pôle, Ua et, je sont la tension et le courant d'induit, et Râ est la résistance d'induit. En changeant Ua ou ϕ peut contrôler la vitesse du servomoteur cc basse tension. Cependant, la méthode de contrôle de la tension d'induit est généralement adoptée. Dans les servomoteurs CC basse tension à aimants permanents, l'enroulement d'excitation est remplacé par des aimants permanents, conservant ainsi le flux magnétique. ϕ constante. Les servomoteurs CC basse tension ont de bonnes caractéristiques de réglage linéaire et des temps de réponse rapides.
Comparaison des caractéristiques de performances entre les servomoteurs CC basse tension et les moteurs pas à pas :
Bien que les moteurs pas à pas et les servomoteurs CC basse tension présentent des similitudes dans les méthodes de contrôle (trains d'impulsions et signaux de direction), il existe des différences significatives dans leurs performances et leurs scénarios d'application. Comparons leurs caractéristiques de performance :
Différence de précision de contrôle :
-
- Nombre de phases dans les moteurs pas à pas : Il s'agit du nombre de groupes de bobines à l'intérieur du moteur. Les moteurs pas à pas couramment utilisés ont des configurations biphasées, triphasées, quadriphasées et cinq phases. Différents numéros de phase correspondent à différents angles de pas. Par exemple, les moteurs biphasés ont généralement des angles de pas de 0,9°/1,8°, les moteurs triphasés ont 0,75°/1,5° et les moteurs triphasés ont 0,36°/0,72°. Lorsqu'il n'y a pas de pilote subdivisé, les utilisateurs choisissent principalement des moteurs pas à pas avec différents numéros de phase pour répondre à leurs exigences en matière d'angle de pas. Avec un pilote subdivisé, le « numéro de phase » n'a plus de sens, car les utilisateurs peuvent modifier l'angle de pas en changeant le numéro de subdivision sur le pilote.
- Précision de contrôle des servomoteurs CC basse tension : Ceci est assuré par le codeur rotatif situé à l'extrémité arrière de l'arbre du moteur. Pour les moteurs équipés d'encodeurs standard de 2 500 lignes, en raison de l'utilisation par le conducteur de la technologie de quadruplement, l'équivalent d'impulsion est de 360°10000=0,036°10000360°=0,036°. Pour les moteurs équipés d'encodeurs 17 bits, le pilote reçoit 131 072 impulsions par tour de moteur, ce qui donne une impulsion équivalente de 360°131072=0,0027466°131072360°=0,0027466°, soit 1/655 de l'équivalent d'impulsion d'un moteur pas à pas avec un angle de pas de 1,8°.
Différence dans les caractéristiques basse fréquence :
-
- Vibrations basse fréquence dans les moteurs pas à pas : Les moteurs pas à pas sont sujets aux vibrations basse fréquence à basse vitesse. La fréquence des vibrations dépend des conditions de charge et des performances du conducteur. La fréquence de vibration est généralement la moitié de la fréquence de démarrage à vide du moteur. Cette vibration basse fréquence, déterminée par le principe de fonctionnement des moteurs pas à pas, est très préjudiciable au fonctionnement normal de la machine. Lorsque les moteurs pas à pas fonctionnent à basse vitesse, des techniques d'amortissement telles que l'ajout d'amortisseurs au moteur ou l'utilisation d'une technologie de subdivision dans le pilote sont généralement utilisées pour surmonter les vibrations basse fréquence.
- Fonctionnement stable des servomoteurs CC basse tension : Les servomoteurs CC basse tension fonctionnent en douceur, sans vibrations, même à basse vitesse. Les systèmes d'asservissement CC basse tension disposent de capacités de suppression de résonance, couvrant les défauts de rigidité mécanique. De plus, le système dispose de capacités d'analyse de fréquence (FFT) en interne, capables de détecter les points de résonance mécanique, facilitant ainsi les ajustements du système.
Différence dans les caractéristiques couple-fréquence :
-
- Couple de sortie des moteurs pas à pas : Le couple de sortie des moteurs pas à pas diminue avec l'augmentation de la vitesse et chute fortement à des vitesses plus élevées. Leur vitesse maximale de fonctionnement est donc généralement comprise entre 300 et 600 RPM.
- Sortie de couple constant des servomoteurs CC basse tension : Les servomoteurs CC basse tension fournissent un couple de sortie constant et peuvent fournir un couple nominal à des vitesses supérieures à la vitesse nominale, fournissant ainsi une puissance de sortie constante.
Différence de capacité de surcharge :
Les moteurs pas à pas n'ont généralement pas de capacité de surcharge. Les servomoteurs CC basse tension ont une forte capacité de surcharge.
Les servomoteurs CC basse tension ont des capacités de surcharge de vitesse et de couple. Leur couple maximum est trois fois supérieur au couple nominal et peut être utilisé pour vaincre le couple d'inertie de la charge au démarrage.
Les moteurs pas à pas n'ont pas cette capacité de surcharge. Par conséquent, pour surmonter ce couple d’inertie, un moteur pas à pas avec un couple plus important est souvent sélectionné, ce qui entraîne une perte de couple lors du fonctionnement normal de la machine.
Différence de performance opérationnelle :
-
- Contrôle des moteurs pas à pas : Les moteurs pas à pas fonctionnent sous contrôle en boucle ouverte. Des fréquences de démarrage élevées ou des charges excessives peuvent entraîner des étapes manquées ou un calage du moteur. Lors de l'arrêt, une rotation à grande vitesse peut entraîner un dépassement. Par conséquent, pour garantir la précision du contrôle, les problèmes d’accélération et de décélération doivent être traités correctement.
- Contrôle des systèmes servo CC basse tension : Les systèmes de servomoteurs CC basse tension fonctionnent sous contrôle en boucle fermée. Le pilote peut échantillonner directement le signal de retour du codeur du moteur, formant en interne une boucle de position et une boucle de vitesse, évitant ainsi les pas manqués ou les phénomènes de dépassement associés aux moteurs pas à pas, et garantissant des performances de contrôle plus fiables.
Différence dans les performances de réponse en vitesse :
-
- Moteurs pas à pas : Il faut 200 à 400 millisecondes aux moteurs pas à pas pour accélérer de l'arrêt à la vitesse de fonctionnement (généralement plusieurs centaines de tours par minute).
- Systèmes de servomoteurs CC basse tension : Les systèmes d'asservissement CC basse tension ont d'excellentes performances d'accélération, ne nécessitant que quelques millisecondes pour accélérer depuis l'arrêt jusqu'à leur vitesse nominale de 3 000 tr/min, ce qui les rend adaptés aux applications de contrôle nécessitant un démarrage rapide.