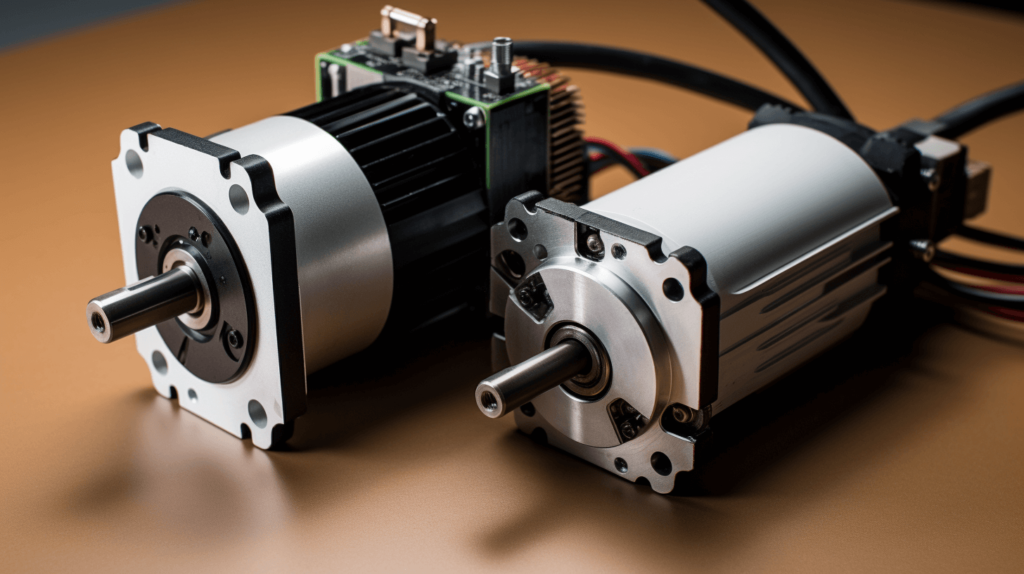
Les moteurs pas à pas et les servomoteurs sont tous deux couramment utilisés dans les applications d'automatisation et de robotique. Mais quelles sont les principales différences entre ces deux types de moteurs et comment déterminer celui qui convient le mieux à votre projet spécifique ? Ce guide comparera la construction des moteurs pas à pas et des servomoteurs, leurs fonctionnalités, leurs avantages et leurs inconvénients, les coûts et les cas d'utilisation idéaux.
Bases du moteur pas à pas
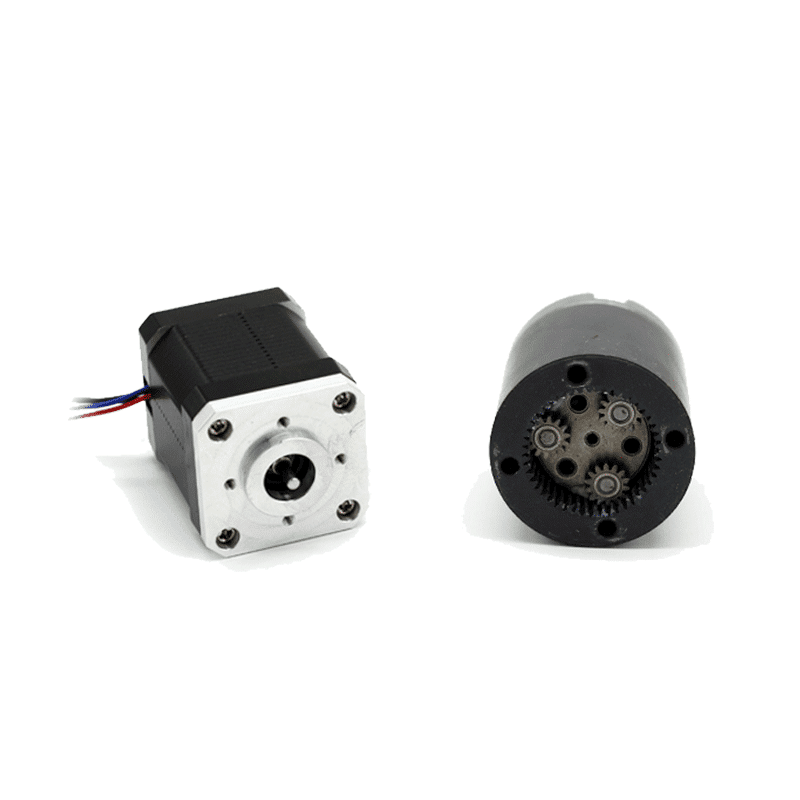
Les moteurs pas à pas fonctionnent en convertissant des impulsions électriques en mouvements ou pas mécaniques discrets. Principales caractéristiques:
Construit avec un rotor à aimant permanent et un stator enroulé.
Alimenté par un courant continu, qui alimente les bobines du stator pour faire tourner magnétiquement le rotor par étapes.
Contrôle en boucle ouverte, donc aucun retour requis.
Excellent couple et précision à basse vitesse, grâce au nombre élevé de pôles.
Maintient sa position au repos.
Les inconvénients incluent la réduction du couple à haute vitesse et l'incapacité de réagir aux changements de charge.
Dans l'ensemble, les moteurs pas à pas excellent dans les applications nécessitant une haute précision et un couple de maintien à basse vitesse. Ils sont simples à contrôler et constituent une solution rentable.
Bases du servomoteur
Les servomoteurs utilisent un retour de position pour le contrôle de la vitesse et du couple en boucle fermée. Principales caractéristiques:
Construit avec un stator triphasé et un rotor à aimant permanent.
Alimenté par un courant alternatif, qui fait tourner le champ magnétique pour faire tourner le rotor.
Le contrôle en boucle fermée nécessite un retour de position.
Maintient un couple constant sur toute la plage de vitesse.
Vitesse, position et couple contrôlables avec précision.
Les inconvénients incluent des coûts et une complexité plus élevés.
Les servos sont idéaux pour les applications nécessitant des vitesses élevées, des mouvements dynamiques et un réglage du couple. Leur contrôle de précision permet des profils de mouvement complexes.
Choisir entre un moteur pas à pas et un servo
Tenez compte des exigences de couple aux vitesses cibles.
Stepper idéal pour les besoins à faible vitesse et de haute précision. Servo idéal pour les vitesses élevées tout en conservant le couple.
Servo recommandé pour changer de charges, stepper mieux pour des charges constantes.
Le pas à pas fournit un couple de maintien à vitesse nulle, le servo nécessite un freinage.
Le servo permet le contrôle de la force, pas le stepper.
Servo plus cher, stepper plus simple et plus rentable.
En comprenant ces différences clés, vous pouvez déterminer si un moteur pas à pas ou un servomoteur est le mieux adapté aux besoins de votre application d'automatisation.