Lorem ipsum dolor sit amet、consectetur adipiscing elit。ウト・エリート・テルス、ルクトゥス・ネク・ウラムコーペル・マティス、プルヴィナー・ダピブス・レオ。
ステッピング モーターは、1 回転を多数のステップに分割するブラシレス同期電動モーターです。フィードバック メカニズムなしで正確な位置決めと制御が可能で、多くの用途に最適です。この完全ガイドでは、ステッピング モーターについて知っておくべきすべてのことを網羅しています。
ステッピング モーターは、電気パルスを個別の機械的動作に変換する電気機械装置です。モーターがアプリケーションに合わせて慎重にサイズ設定されていれば、フィードバック用の位置センサー (オープン ループ コントローラー) を使用せずに、モーターの位置を移動してこれらのステップのいずれかで保持するように命令できます。
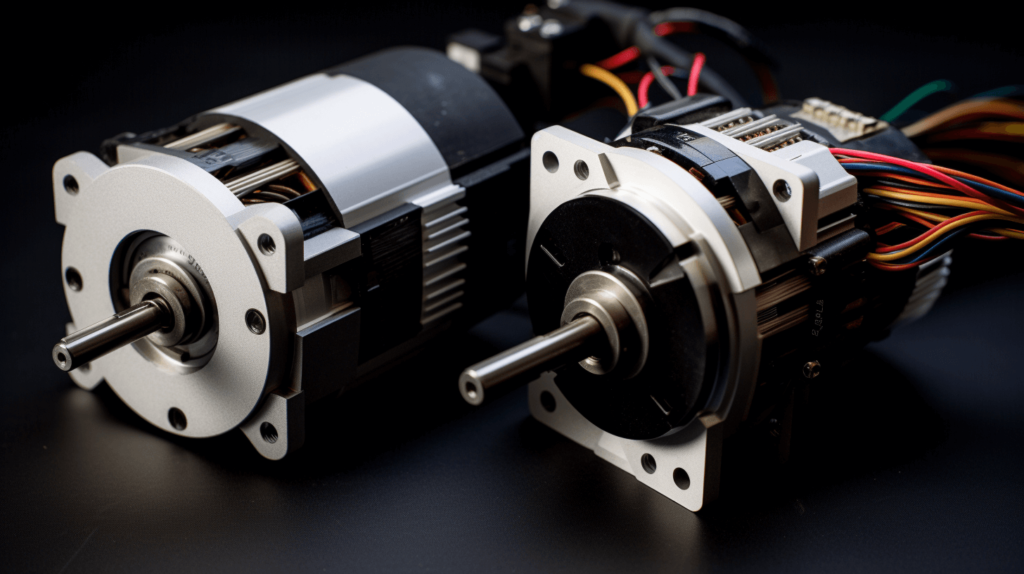
ステッピング モーターは電磁気の原理に基づいて動作します。基本構造は永久磁石でできたローターと電磁石を備えたステーターで構成されます。ステーターのコイルに電流が流れると、永久磁石ローターの磁場と相互作用する磁場が生成され、回転が起こります。
コイルの電流の順序とタイミングを正確に制御することで、モーターを個別の回転ステップで動かすことができます。一般的なステップ角度は、15°、7.5°、5°、2.5°、1.8° です。ステップ角度が小さいほど、解像度と位置精度が高くなります。
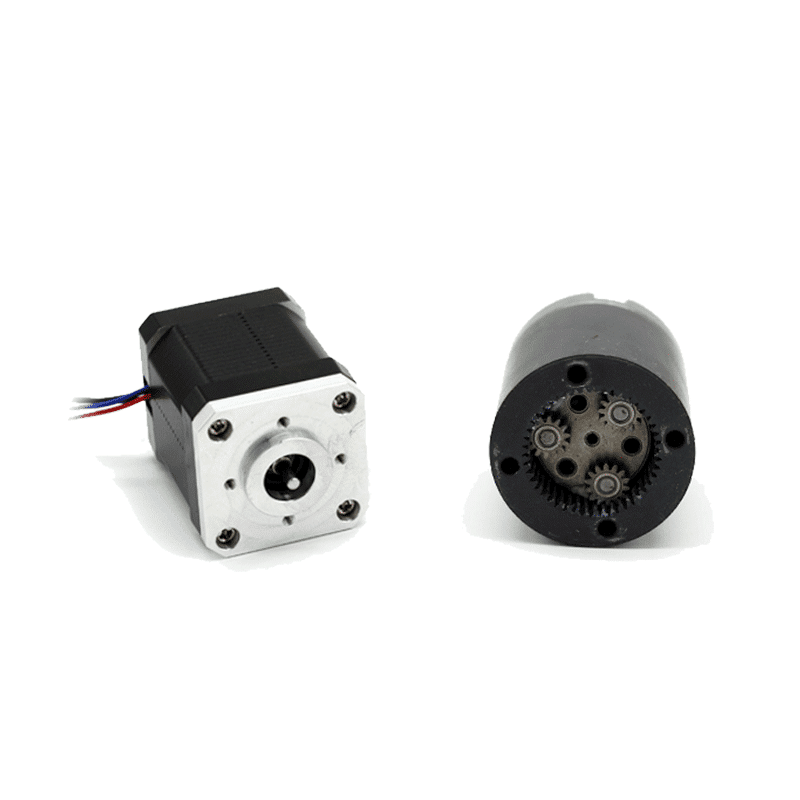
ステッピングモーターには主に 3 つのタイプがあります。
ハイブリッド バイポーラ ステッピング モーターは最も一般的であり、優れた低速トルクと高速なモーション制御を提供します。
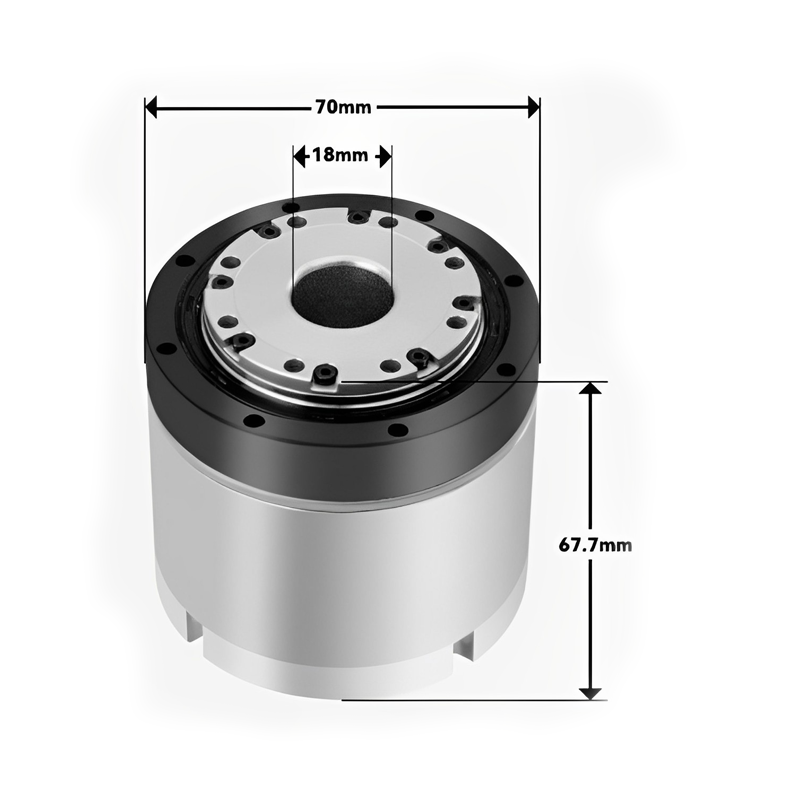
ステッピングモーターを選択する際に考慮すべき重要な要素:
ステッピング モーターには、各相を順番に通電するための専用ドライバーが必要です。一般的な駆動モード:
デジタル I/O ピンまたは専用のステッピング コントローラを使用するマイクロコントローラ インターフェイスは、適切なステップと方向の信号でドライバに指示することにより、モーターの位置と速度を制御できます。
ステッピングモーターは次のような用途に使用されます。
ステッピング モーターは、その独自の利点により、正確な位置、速度、タイミングを必要とするモーション コントロール システムの不可欠なコンポーネントであり続けます。
ファラディの最近の投稿