
これまで、エアコン、洗濯機、扇風機、ヘアドライヤーなどの日常的な家電製品でブラシレス DC モーターとドライバーを目にしたことがあるにもかかわらず、ほとんどの人はそれらについて認識していませんでした。実際のコンポーネントに触れる機会がないため、システム全体に関する知識が限られているのは当然です。
ブラシレス DC モーター システムの基本的な側面について詳しく見ていきましょう。
すべてのモーターには「整流」という概念が関係しています。これは、物理的なローターを動かすために電流を(特定の方法で)切り替えるプロセスを指します。コイルに電流が流れると、ローターが動き、磁場(通常は永久磁石によって生成されます)が生成されます。この磁場は既存の磁場を反発または引き付け、ローター(モーターの可動部分)をステーター(モーターの固定部分)に対して動かします。
磁石の概念は、整流の良い例えになります。同じ極を持つ 2 つの磁石をテーブルの上に向かい合わせて置くと、それらは互いに反発します。これらの磁石が十分に離れている場合、それらは動きを止めます。一方の磁石をもう一方の磁石に近づけると、反発によりもう一方の磁石が押し出されます。このプロセスを続けると、連続的な動きが生まれます。これは整流の線形例です。
ブラシ付きDCモーターは機械的な整流を実現する
つまり、モーターの物理的構造によって整流が起こります。ブラシが整流子と接触し、モーターが回転すると、モーターのコイルを流れる電流の極性が切り替わります。これにより、ステーターの永久磁石によって生成される磁場が、ローターによって生成される磁場と常に反対になり、継続的な力が確保されます。機械的整流とは、ブラシ付き DC モーターでは、モーターの巻線に電圧を印加するだけで回転することを意味します。
ブラシレス DC モーターについてはまだ説明していないため、この時点でタイトルに戸惑う読者も多いかもしれません。しかし、「ブラシレス」について説明するには、まずブラシが使用される場所を明確にする必要があります。
ブラシレス DC モーターの起源は比較的単純です。
ブラシ付き DC モーターの問題のほとんどはブラシから生じます。ブラシは火花を散らし、摩耗し、大きな音を発し、電力消費量の増加につながり、速度を制限し、冷却を困難にします。つまり、ブラシ付き DC モーターは、長寿命、静かな動作、高速または高出力システムでの高効率が求められる可燃性材料の周囲での用途には適していません。これらはブラシの重大な欠点であり、ブラシをなくすことで対処できますが、これにより機械的な整流もなくなります。
機械的な整流がないため、他の問題も生じる。
モーターには整流が必要です。ブラシレス DC モーターは電気整流を使用します。魔法のように聞こえますか? この方法では、モーターの電流がローターを動かすことができる磁場を一貫して生成するようにする必要があります。ローターを動かすために電流をどのように流すかを考えるには、ローターの位置を知る必要があります。
ブラシレス DC モーター システムにおける最初の主要な構造上の決定は、「センサー付き」システムと「センサーなし」システムを区別することです。
ローターの位置を知る必要がある場合は、次の 2 つの方法が役立ちます。
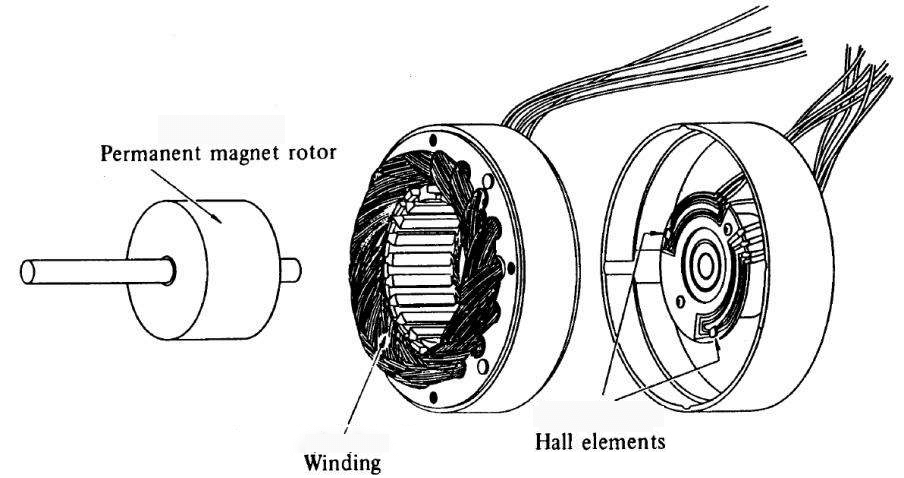
- センサー方式では、通常、ホール効果センサーまたはエンコーダーを使用してローターの位置を検出します。エンコーダーは非常に正確な角度フィードバックを提供できますが、この方法はコストが高くなります。ホール効果センサーは一般的な磁気センサーであり、3 相ブラシレス DC モーターでは、3 つのホール効果センサーを配置することで、単純な 6 ステップ整流を実現できます。
- センサレス方式では、モーターの回転時に発生する逆起電力 (EMF) を推定します。逆起電力は複雑なトピックなので、個別に説明するのが最適です。簡単に言うと、モーターのコイルに発生する電圧で、モーターの速度と負荷の関数です。センサレス方式は基本的に推定値であり、複雑な計算が必要になることがよくあります。モーターの速度が遅くなると (例: サーボ モーターの位置制御)、逆起電力が減少するため、センサレス方式は非常に困難になります。

ブラシレス DC モーター システムにおける 2 番目の主要な構造上の決定は制御方法です。
ローターの位置がわかっていて、ローターを動かすために特定の電流を流す必要がある場合、3 相ブラシレス DC モーターには少なくとも 6 つの異なる電位が必要です。ブラシレス DC モーターの整流方法を決定するには、「台形」、「6 ステップ」、または「120 度」の制御方法を使用できます。
- 台形整流
- 正弦波整流
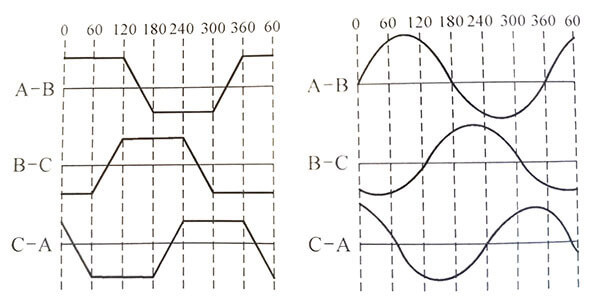
もう 1 つの方法は、モーターにより滑らかな電流波形を適用するもので、「正弦波」制御または「180 度」制御と呼ばれます。
この制御方法は、適切なモーターと併用すると効率を向上させ、ノイズを低減できますが、複雑さが増し、より正確なパルス幅変調 (PWM) タイミングが必要になることがよくあります。
上記の内容は、ブラシレス DC モーター システムの基礎知識の簡単な紹介です。トピックが広範囲にわたるため、磁場方向制御、モーターの起動、内側と外側のローター、極数、Δ (デルタ) と Y 型巻線、およびその他の多くの詳細などについては、この記事では取り上げていません。ただし、この情報がモーターの知識を広げるのに役立つことを心から願っています。
東莞ファラディモーターズ株式会社は、世界的な産業オートメーション分野を専門とし、高性能、高品質のブラシレスDCモーター、DCサーボモーター、ステッピングモーター、および関連するドライブコントローラーの研究開発に注力しており、モーションコントロールテクノロジーソリューションにおける国内有数のハイテク企業となっています。










