Lorem ipsum dolor sit amet、consectetur adipiscing elit。ウト・エリート・テルス、ルクトゥス・ネク・ウラムコーペル・マティス、プルヴィナー・ダピブス・レオ。
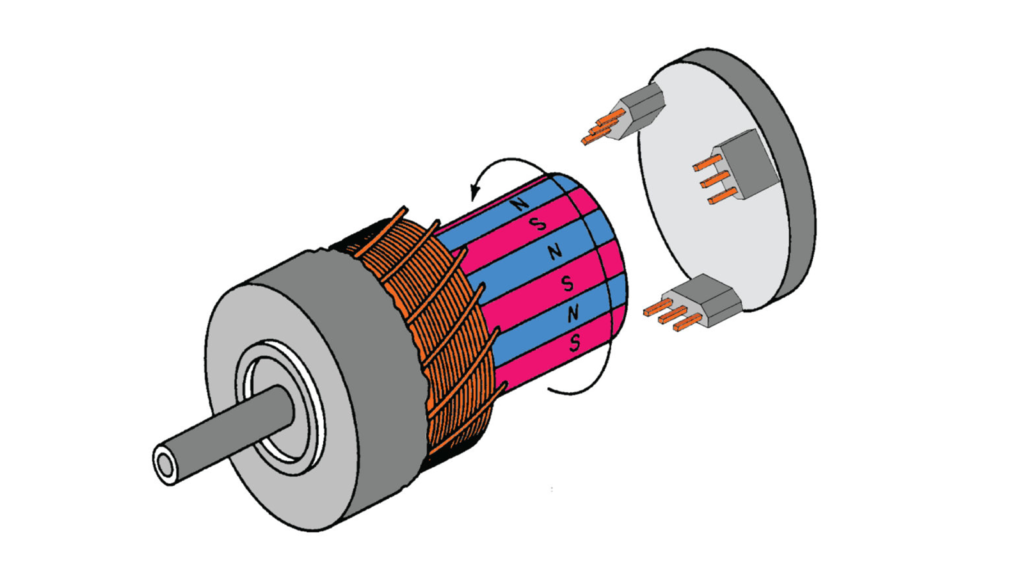
ブラシレス モーターの極ペアは、ローターの磁場の変化を検出することによって決定されます。ローターの磁性鋼は、N 極と S 極が交互に配置されています。ブラシレス モーターのホール センサーが N 極から S 極、または S 極から N 極への遷移を検出すると、ホールの出力は対応する高レベルと低レベルの変化を起こし、ローターの位置の変化を示します。ブラシレス モーターの巻線の通電は、ホール センサーの検出には影響しません。
ブラシレス モーターの磁場の回転速度 (同期速度とも呼ばれる) は、三相電流の周波数と極対数 (p) に関連しています。固定子巻線が、任意の瞬間に 1 対の極 (極対数、p = 1) のみを持つ磁場を生成する場合、つまり極が 2 つしかない場合、1 対の極のみを持つ回転磁場では、三相電流が 1 回変化し、合成磁場も 1 回回転します。50 Hz の AC 電流の場合、回転磁場の同期速度は 1 秒あたり 50 回転、または 1 分あたり 3000 回転 (r/min) です。工学では、速度を表すために通常、毎分回転数 (r/min) が使用されます。ブラシレス モーターの固定子巻線が 2 対の極 (極対数、p = 2) を持つ磁場を生成する場合、つまり 4 つの極がある場合、p 極対を持つ回転磁場の同期速度 n は n = 60f/p で与えられると推測できます。
ブラシレスモーターの極対数が一定の場合、交流電流の周波数を変えることで回転磁界の同期速度を変えることができます。これが可変周波数速度制御の基本原理です。モーターの極は対になっているため、極対数で表すことが多いです。
ブラシレス モーターは、ホール センサーを使用して磁性鋼の変化を検出し、極対数を決定し、コントローラーを介してブラシレス モーター ローターの速度と極対検出を制御します。
ファラディの最近の投稿