この記事では、ブラシレス モーターの整流ノイズ周波数を計算するための公式を簡単に分析します。ブラシレス モーターは、3 相巻線の電流の方向を表す 1 と 0 で示される 6 つの異なる状態で動作します。1 は正、0 は負です。正の電流は巻線の最初の端から最後の端に流れ、負の電流は最後の端から最初の端に流れます。
ブラシレス モーターの 1 つのモーター ユニット (1 対の極を持つステータまたはローター) は、1 サイクル内で 6 つの動作状態を示します。隣接する状態間の遷移により、整流トルクリップルと呼ばれるトルク脈動が発生し、ステータとローターの両方に影響します。ブラシレス モーターには通常 4 対の極があるため、1 サイクルで合計 4×6=24 の動作状態があります。したがって、整流トルクリップル周波数 (整流周波数と呼ばれる) を計算する式は次のように導かれます。
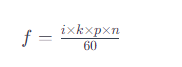
どこ:
- (i)は周波数の順序であり、整流ノイズ周波数をヘルツ(Hz)で表す。
- (k)は、ステータまたはロータの1サイクルにおける各極ペアに対応する動作状態の数である。
- ( p ) はブラシレスモーターの極対数である。
- (n)は毎分回転数(RPM)で表したモーター速度です。
ほとんどのブラシレス モーターは前述の 6 番目の状態で動作するため、式は次のように簡略化できます。
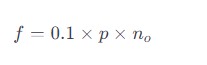
ブラシレス モーターの整流周波数がモーター システムの固有周波数と一致するかそれに近づくと、対応する周波数で顕著な振動と整流ノイズが発生します。
この記事では、ブラシレス モーターの整流ノイズ周波数を計算するための公式の基本的な概要を説明します。Faradyi Motors は、世界的な産業オートメーション分野における高性能、高品質のブラシレス モーター、DC サーボ モーター、ステッピング モーター、および関連するドライブ コントローラーの研究、開発、製造に重点を置いています。同社は中国を代表するハイテク企業であり、高度なモーション コントロール技術ソリューションを提供しています。