6 critérios para escolher o motor certo para um robô de braço articulado

Selecionar os motores certos para um robô colaborativo dedicado à investigação e à educação é de facto crucial para alcançar movimentos precisos e eficientes. Aqui estão alguns critérios importantes a serem considerados ao escolher motores para tal robô
1. Potência e Torque
- Determine o peso máximo que o robô precisa suportar. Escolha um motor que possa suportar pelo menos esta capacidade de carga útil com alguma margem de segurança e expansão futura.
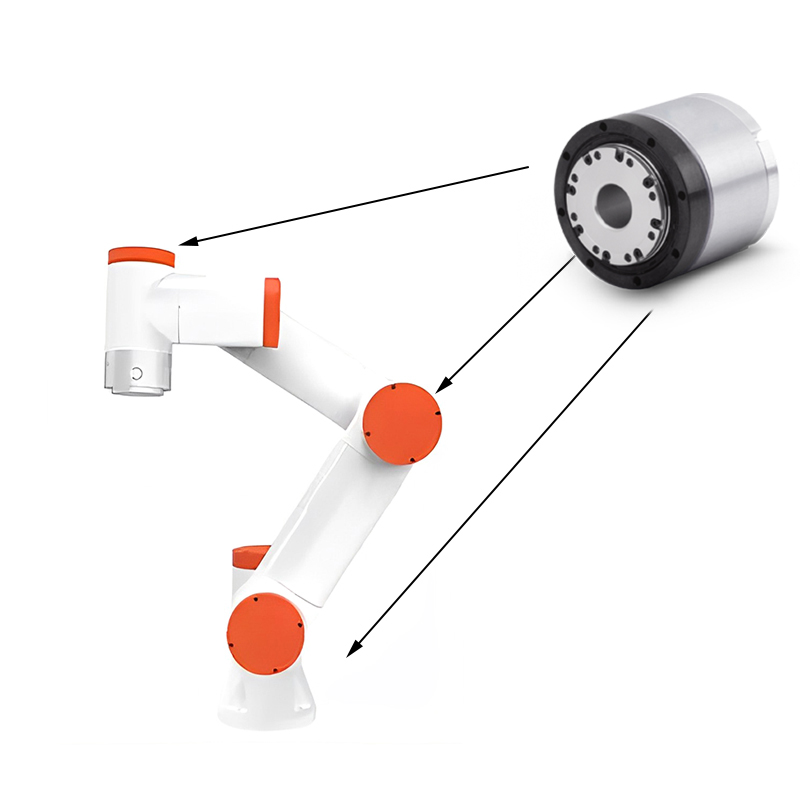
- Quanto maior a relação de transmissão do redutor, maior será a aceleração máxima do motor.
2. Aceleração Máxima
- Torque é a força rotacional fornecida pelo motor. Motores de maior torque podem suportar cargas mais pesadas e oferecer melhor desempenho em tarefas desafiadoras. Considere os requisitos de torque com base no peso e no tipo de objetos com os quais o robô irá interagir.
3. Precisão e exatidão

- Para fins de pesquisa e educacionais, movimentos precisos e exatos são essenciais. Motores com alta precisão e baixa folga garantirão que o robô possa repetir tarefas de maneira confiável.
4.Eficiência energética
- Motores com baixo consumo de energia ajudarão a prolongar a vida útil da bateria do robô, reduzindo a frequência de recargas durante a operação.
5.Características de segurança
- Os robôs colaborativos trabalham próximos aos humanos, portanto a segurança é crítica. Procure motores com recursos de segurança integrados, como limitação de corrente e proteção térmica, para evitar superaquecimento e riscos potenciais.
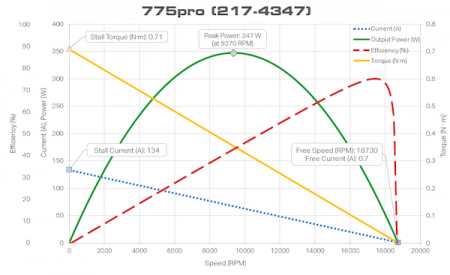
6.Velocidade
- A velocidade dos motores afetará as capacidades de movimento do robô. Dependendo da aplicação, pode ser necessário equilibrar movimentos em alta velocidade para ações rápidas ou velocidades mais lentas para tarefas mais precisas.
- Embora os braços robóticos industriais muitas vezes exijam capacidades de alta velocidade, aqueles projetados para educação normalmente têm requisitos de velocidade mais baixos. No entanto, um motor com capacidade de alta velocidade ainda pode ser benéfico em certas aplicações, como quando o robô precisa realizar movimentos rápidos ou quando uma frequência operacional mais alta é necessária de acordo com o uso robótico cases.
- A velocidade de um braço robótico educacional depende do uso pretendido, mas geralmente, um motoredutor com faixa de velocidade de 10-100 RPM é suficiente para a maioria das aplicações. O motor também deve ser capaz de manter uma velocidade consistente em toda a sua amplitude de movimento, para garantir movimentos exatos e precisos.
7.Disponibilidade e Suporte
- Verifique a disponibilidade de peças de reposição e suporte técnico para os motores escolhidos. Ter acesso a peças de reposição e suporte confiável pode reduzir significativamente o tempo de inatividade em caso de problemas.