Introdução
Os motores de passo convertem sinais de pulso elétrico em deslocamentos angulares ou lineares correspondentes. Com cada sinal de pulso de entrada, o rotor gira em um determinado ângulo ou avança um passo. O deslocamento angular ou linear de saída é proporcional ao número de pulsos de entrada e a velocidade é proporcional à frequência do pulso. Portanto, os motores de passo atuam como componentes que convertem pulsos em deslocamentos angulares (ou lineares).
Os motores de passo possuem um rotor e estator distribuídos multipolares com enrolamentos de controle multifásicos conectados em estrela. Cada sinal de pulso de entrada faz com que o rotor do motor de passo avance um passo. Como a entrada é um sinal de pulso, o deslocamento angular de saída é descontínuo, daí o nome “motor de pulso”.
Com o desenvolvimento de sistemas de controle digital, a aplicação de motores de passo se expandirá gradualmente. Os motores de passo vêm em vários tipos, incluindo reativos, de excitação e híbridos, com base em sua estrutura, e podem ser classificados em monofásicos, bifásicos e multifásicos com base no número de fases.
Servo motor CC de baixa tensão
Os servomotores CC de baixa tensão podem ser entendidos como motores que seguem estritamente os comandos do sinal de controle: o rotor permanece estacionário até que um sinal de controle seja emitido; após a emissão do sinal, o rotor gira imediatamente; e quando o sinal de controle desaparece, o rotor para instantaneamente.
Servo motores CC de baixa tensão são micromotores utilizados como componentes de atuação em dispositivos de controle automático, convertendo sinais elétricos em deslocamentos angulares ou velocidades angulares do eixo. Suas principais características incluem: ausência de auto-rotação quando a tensão do sinal é zero, diminuição da velocidade com o aumento do torque e controle altamente preciso de velocidade e posição.
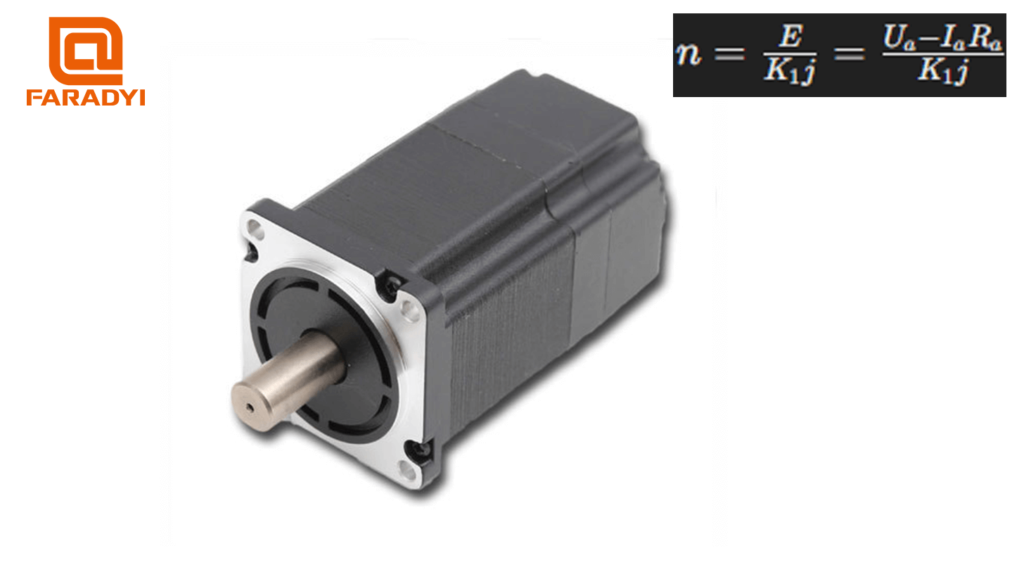
A estrutura básica dos servomotores CC de baixa tensão é semelhante à dos motores CC gerais.
A velocidade do motor n é dado pela fórmula:
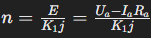
onde E é a força eletromotriz traseira da armadura, K é uma constante, j é o fluxo por pólo, Ua e, I a são a tensão e a corrente da armadura, e Rá é a resistência da armadura. Mudando Ua ou ϕ pode controlar a velocidade do servo motor DC de baixa tensão. Entretanto, o método de controle da tensão da armadura é geralmente adotado. Nos servomotores CC de baixa tensão com ímã permanente, o enrolamento de excitação é substituído por ímãs permanentes, mantendo o fluxo magnético ϕ constante. Os servomotores CC de baixa tensão possuem boas características de ajuste linear e tempos de resposta rápidos.
Comparação das características de desempenho entre servomotores CC de baixa tensão e motores de passo:
Embora os motores de passo e os servomotores CC de baixa tensão tenham semelhanças nos métodos de controle (trens de pulso e sinais de direção), existem diferenças significativas em seus cenários de desempenho e aplicação. Vamos comparar suas características de desempenho:
Diferença na precisão do controle:
-
- Número de fases em motores de passo: Isto se refere ao número de grupos de bobinas dentro do motor. Os motores de passo comumente usados têm configurações bifásicas, trifásicas, quadrifásicas e cincofásicas. Diferentes números de fase correspondem a diferentes ângulos de passo. Por exemplo, os motores bifásicos normalmente têm ângulos de passo de 0,9°/1,8°, os motores trifásicos têm 0,75°/1,5° e os motores cincofásicos têm 0,36°/0,72°. Quando não há driver subdividido, os usuários escolhem principalmente motores de passo com diferentes números de fase para atender aos seus requisitos de ângulo de passo. Com um driver subdividido, o “número de fase” perde o sentido, pois os usuários podem alterar o ângulo do passo alterando o número de subdivisão no driver.
- Precisão de controle de servomotores CC de baixa tensão: Isto é garantido pelo codificador rotativo na extremidade traseira do eixo do motor. Para motores equipados com encoders padrão de 2.500 linhas, devido ao uso da tecnologia quadruplicada pelo driver, o pulso equivalente é 360°10000=0,036°10000360°=0,036°. Para motores com encoders de 17 bits, o driver recebe 131.072 pulsos por rotação do motor, resultando em um pulso equivalente a 360°131072=0,0027466°131072360°=0,0027466°, que é 1/655 do pulso equivalente de um motor de passo com ângulo de passo de 1,8°.
Diferença nas características de baixa frequência:
-
- Vibração de baixa frequência em motores de passo: Os motores de passo são propensos a vibrações de baixa frequência em baixas velocidades. A frequência de vibração depende da condição de carga e do desempenho do driver. A frequência de vibração é normalmente metade da frequência de partida sem carga do motor. Esta vibração de baixa frequência, determinada pelo princípio de funcionamento dos motores de passo, é altamente prejudicial ao funcionamento normal da máquina. Quando os motores de passo operam em baixas velocidades, técnicas de amortecimento, como adicionar amortecedores ao motor ou usar tecnologia de subdivisão no driver, são geralmente empregadas para superar vibrações de baixa frequência.
- Operação estável de servomotores CC de baixa tensão: Os servomotores CC de baixa tensão operam suavemente, sem vibração, mesmo em baixas velocidades. Os servossistemas CC de baixa tensão apresentam recursos de supressão de ressonância, cobrindo deficiências de rigidez mecânica. Além disso, o sistema possui recursos de análise de frequência (FFT) internamente, capazes de detectar pontos de ressonância mecânica, facilitando os ajustes do sistema.
Diferença nas características de frequência de torque:
-
- Torque de saída de motores de passo: O torque de saída dos motores de passo diminui com o aumento da velocidade e cai drasticamente em velocidades mais altas. Portanto, sua velocidade máxima de operação geralmente fica entre 300 e 600 RPM.
- Saída de torque constante de servomotores CC de baixa tensão: Os servomotores CC de baixa tensão fornecem saída de torque constante e podem fornecer torque nominal em velocidades acima da velocidade nominal, fornecendo saída de potência constante.
Diferença na capacidade de sobrecarga:
Os motores de passo geralmente não possuem capacidade de sobrecarga. Os servomotores CC de baixa tensão têm forte capacidade de sobrecarga.
Os servomotores CC de baixa tensão possuem capacidade de sobrecarga de velocidade e torque. Seu torque máximo é três vezes o torque nominal e pode ser usado para superar o torque de inércia da carga na partida.
Os motores de passo não possuem essa capacidade de sobrecarga. Portanto, para superar esse torque de inércia, um motor de passo com um torque maior é frequentemente selecionado, resultando em torque desperdiçado durante a operação normal da máquina.
Diferença no desempenho operacional:
-
- Controle de motores de passo: Os motores de passo operam sob controle de malha aberta. Altas frequências de partida ou cargas excessivas podem levar a etapas perdidas ou parada do motor. Ao parar, a rotação em alta velocidade pode causar ultrapassagem. Portanto, para garantir a precisão do controle, as questões de aceleração e desaceleração devem ser tratadas adequadamente.
- Controle de Servo Sistemas DC de Baixa Tensão: Os sistemas de servoacionamento CC de baixa tensão operam sob controle de malha fechada. O driver pode amostrar diretamente o sinal de feedback do codificador do motor, formando internamente um loop de posição e um loop de velocidade, evitando assim passos perdidos ou fenômenos de overshoot associados aos motores de passo e garantindo um desempenho de controle mais confiável.
Diferença no desempenho de resposta de velocidade:
-
- Motores de passo: São necessários de 200 a 400 milissegundos para que os motores de passo acelerem da paralisação até a velocidade operacional (normalmente várias centenas de rotações por minuto).
- Sistemas servo CC de baixa tensão: Os servossistemas CC de baixa tensão têm excelente desempenho de aceleração, exigindo apenas alguns milissegundos para acelerar desde a paralisação até a velocidade nominal de 3.000 RPM, tornando-os adequados para aplicações de controle que exigem partida rápida