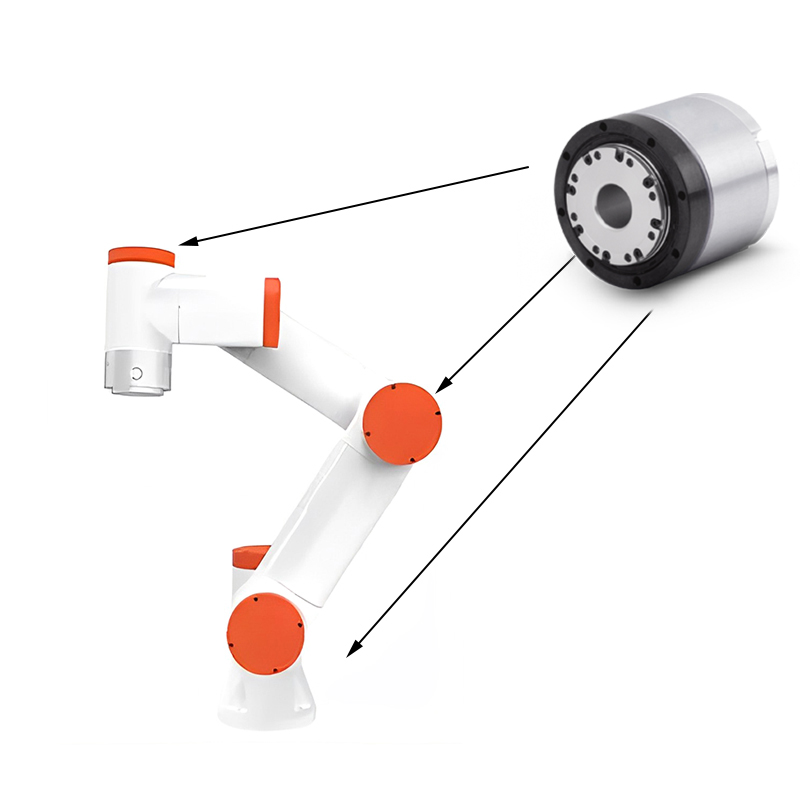
Um motor de módulo de junta robótica é um tipo de motor projetado especificamente para ser usado em aplicações de junta robótica. Esses motores são usados para controlar o movimento de braços robóticos e outros tipos de articulações robóticas.
Existem vários tipos de motores que podem ser usados como motores de módulo de junta de robô, incluindo servo motores, motores de passo, motores de engrenagem CC, motores sem escova, atuadores lineares, servo motores CA e motores de acionamento harmônico. Cada um desses tipos de motor possui seu próprio conjunto de pontos fortes e fracos, e a escolha do motor dependerá dos requisitos específicos da aplicação da junta robótica.
Os motores dos módulos articulares do robô são componentes críticos dos sistemas robóticos, pois são responsáveis por controlar com precisão o movimento das articulações do robô. Sem um controle motor confiável e preciso, um braço robótico ou outro mecanismo robótico articulado seria incapaz de executar as tarefas pretendidas.
Além de seu uso em robótica, os motores de módulos articulados de robôs também podem ser usados em outras aplicações onde é necessário um controle de motor preciso e confiável, como em automação industrial ou dispositivos médicos.