

Há uma diferença básica entre o controle vetorial e o controle de onda senoidal de motores sem escova, que é a forma como eles controlam a corrente dos motores sem escova. À medida que a velocidade do motor sem escova aumenta, a largura de banda do controlador PI para controle de onda senoidal atingirá o limite, resultando em falha de controle. Em contraste, o controle vetorial consegue um controle preciso da corrente da bobina do estator controlando diretamente os componentes da corrente vetorial nas direções paralela e perpendicular do campo magnético do rotor. Sob controle vetorial, o controle de corrente não muda mais com o tempo, mas se torna um controle CC estático, eliminando assim as limitações de resposta de frequência e desvio de fase. Portanto, a qualidade da corrente no modo de controle vetorial não tem nada a ver com a velocidade do motor.
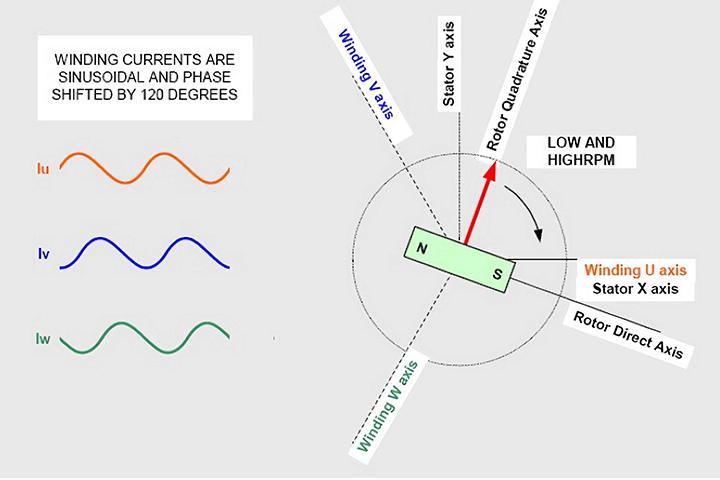
No caso do controle vetorial, controlamos principalmente os componentes da corrente e tensão do motor sem escova nas direções paralela e vertical do campo magnético do rotor. Isso significa que precisamos calcular matematicamente a corrente medida do motor sem escova para convertê-la da estrutura estática trifásica do estator para a estrutura dinâmica dq do rotor (paralela e perpendicular à direção do campo magnético do rotor). Da mesma forma, a tensão de controle na extremidade do motor sem escova também precisa ser calculada matematicamente para convertê-la da estrutura dq do rotor para a estrutura estática trifásica do estator e, em seguida, inserida na parte PWM para modulação. Essas conversões exigem recursos de processamento matemático de alta velocidade, de modo que o DSP e os processadores de alto desempenho se tornam o núcleo do controle vetorial.
Embora esta conversão possa ser concluída em apenas um cálculo, para conveniência da descrição, dividimos-a em duas etapas. Primeiro, a corrente do motor muda da estrutura física trifásica do estator com uma diferença de fase de 120 graus para uma estrutura dq ortogonal dinâmica estável em ângulo reto e, em seguida, converte esta estrutura dinâmica do estator na estrutura estática trifásica do rotor. Para garantir resultados válidos, estes cálculos devem ser concluídos dentro de um período de amostragem do controlador PI. A conversão acima é o oposto da operação de conversão do sinal de tensão exigido pelo controlador PI da estrutura dq para a estrutura trifásica da bobina do estator.
Uma vez que a corrente do motor sem escova é convertida em uma estrutura dq, o controle se torna muito simples. Precisamos de dois controladores PI: um para controlar a corrente paralela ao campo magnético do rotor e outro para controlar a corrente perpendicular ao campo magnético do rotor. Como o sinal de controle da corrente paralela é zero, a componente da corrente paralela do motor sem escova também se torna zero, convertendo todos os vetores de corrente do motor sem escova em corrente vertical. Isto maximiza a eficiência dos motores sem escovas porque apenas a corrente vertical pode produzir torque efetivo. Outro controlador PI é usado principalmente para controlar a corrente vertical para obter o torque necessário consistente com o sinal de entrada. Isso garante que a corrente vertical seja controlada conforme necessário para obter o torque necessário.
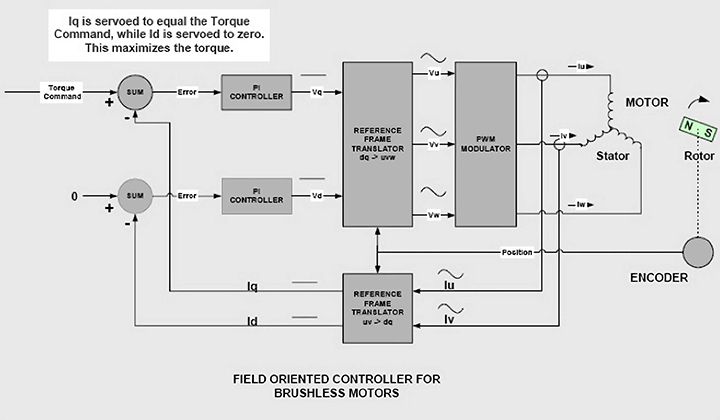
Os sinais de saída dos dois controladores PI representam o vetor de tensão do rotor. Esses vetores de tensão estática passam por uma série de conversões de coordenadas de referência para obter os sinais de controle de tensão necessários para a ponte de saída. Eles são primeiro convertidos da estrutura de referência dinâmica dq do rotor para a estrutura estática xy do estator. O sinal de tensão é então convertido em estruturas físicas espaçadas de 120 graus entre si e, finalmente, inserido nas bobinas trifásicas U, V e W do motor sem escova. Esses três sinais de tensão precisam ser modulados por PWM antes de serem inseridos na bobina do motor sem escova.
O trabalho de conversão dos sinais de corrente e tensão senoidais variáveis no tempo na bobina do motor sem escova em um sinal DC de estrutura dq é a conversão das coordenadas de referência.
A diferença essencial entre a comutação de onda senoidal e o controle vetorial está na maneira como a conversão de coordenadas e o controle de corrente são tratados. No método de comutação de onda senoidal, primeiro realizamos a comutação e, em seguida, obtemos a corrente de onda senoidal necessária por meio do controle PI. Portanto, o controle PI do sistema processa principalmente os sinais senoidais variáveis no tempo da corrente e tensão do motor sem escova, e o desempenho do motor sem escova será limitado pela largura de banda do controlador e pelo desvio de fase. No controle vetorial, o sinal de corrente é primeiro controlado pelo PI e depois passa por processamento de comutação em alta velocidade. Portanto, o controlador PI não precisa processar sinais de corrente e tensão variáveis no tempo, e o sistema não será afetado pela largura de banda e desvio de fase do controlador PI.
Portanto, por que o controle vetorial é superior?
O controle vetorial faz com que o motor se comporte igualmente suavemente em baixas velocidades e em altas velocidades. Em contraste, a comutação sinusoidal permite uma operação suave em baixas velocidades, mas resulta numa redução significativa na eficiência em altas velocidades. A comutação por onda trapezoidal se comporta normalmente quando o motor está funcionando em alta velocidade, mas causará flutuações de torque em baixa velocidade. Portanto, o controle vetorial é considerado o melhor método de controle para motores sem escova.










