- (+086) 18923470557
- [email protected]
- 7F, No.53 Fofu Road, cidade de Dalang, cidade de Dongguan, Guangdong, CN, 523770







Com protocolos de comunicação EtherCAT, CANopen, Modbus.
Posição, velocidade, loop de corrente PID ajustável em tempo real.
Entrada analógica de ± 10V integrada.
Pulso e direção, E/S, RS485,
Codificador externo e interface STO,
Tudo no espaço de DxL=70x67mm
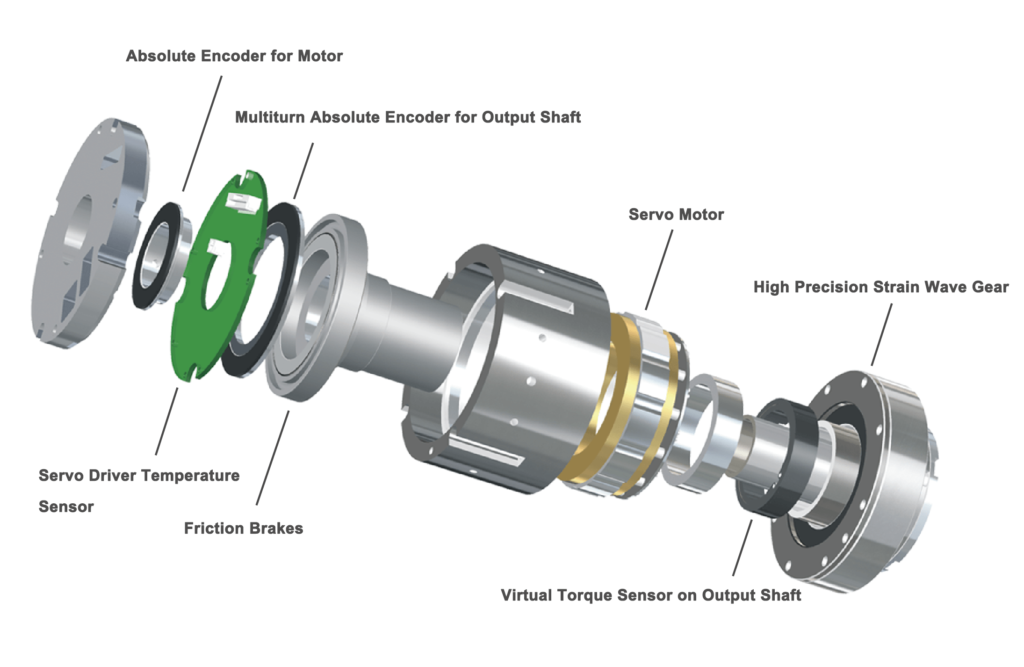
Codificador multivolta absoluto de 19 bits para eixo de saída.
Repetibilidade de até ±7 segundos de arco.
Precisão absoluta de até ±15 * segundos de arco.
Sempre tenha posição absoluta real e contador multivoltas ao desligar.

Freio suave e estável.
Nenhuma lacuna; Sem reação.
Não há necessidade de se mover ao ligar.
Sem desgaste.
Pode ser usado como parada de emergência.