1. ¿Cómo seleccionar la fuente de alimentación del robot?

2. ¿Cuáles son las diferencias entre los módulos de unión de una vuelta y de varias vueltas?
3. ¿Qué tan alta es la precisión de las articulaciones del robot?
4. ¿Cómo es el ruido operativo de los módulos de articulación del robot?
5. El motor no puede alcanzar la posición objetivo correctamente.
6. El voltaje del bus está por debajo del ajuste de voltaje mínimo permitido.
7. El voltaje del bus está por encima del ajuste de voltaje máximo permitido.
8. Las corrientes de fase (U/V/W) exceden la corriente máxima permitida.
9. Activar corriente máxima (corte).
10. Manejo de errores: Corriente y error del motor trifásico.
11. Error de batería del codificador multivuelta en el extremo de carga.
12. Ajuste de calado del motor.
13. El error de posición excede el error máximo permitido.
14. El error de velocidad excede el error de velocidad máximo permitido.
15. La velocidad del motor excede el ajuste de velocidad máximo permitido.
16. ¿Qué representan el par nominal y el par máximo permitido?
17. ¿Qué se debe considerar antes de instalar juntas con funcionalidad de una o varias vueltas?
18. ¿Cómo se calcula la fuerza de torsión de flexión para los módulos de unión eRob?
Método de cálculo para el momento estático de carga máxima (Mmax):
Confirme Mmax ≤ Mc (consulte los símbolos de fórmula en la Tabla 1-2).
Tabla 1-1 Explicación de los símbolos de fórmula:
- Frmax: Carga radial máxima (N o kgf) – Consulte el diagrama de carga externa.
- Famax: Carga axial máxima (N o kgf) – Consulte el diagrama de carga externa.
- Lr, La: __ (unidad no especificada, posiblemente metros) – Consulte el diagrama de carga externa.
- R: Desplazamiento (m): consulte el diagrama de carga externa en la tabla de especificaciones de cada serie.
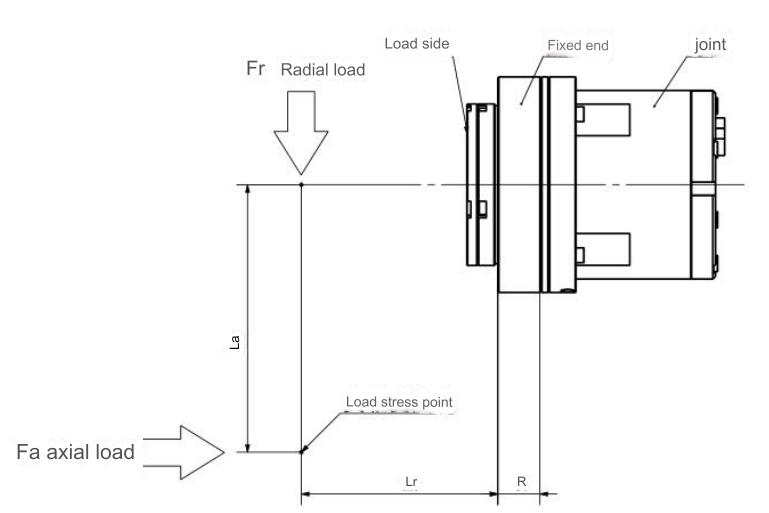
Tabla 1-2 Valores de torsión permitidos para cada tipo de junta:
| Tipo de junta | Desplazamiento (R) | Carga de par permitida (Mc) |
|---|---|---|
| eRob70 | 0,0217m | 74 Nm / 7,6 kgfm |
| eRob80 | 0,0239m | 124 Nm / 12,6 kgfm |
| eRob90 | 0,0255m | 187 Nm / 19,1 kgfm |
| eRob110 | 0,0296m | 258 Nm / 26,3 kgfm |
| eRob142 | 0,0364m | 580 Nm / 59,1 kgfm |
| eRob170 | 0,044m | 849 Nm / 86,6 kgfm |
Ejemplo: Dada la selección de la junta eRob70H con La = 0,2 m, Lr = 0,5 m, Frmax = 50 N y Famax = 30 N.
De la Tabla 1-2, R = 0,0217 m, Mc = 74 Nm.
Sustituir en la fórmula:
Desde , satisface los requisitos de par de flexión.
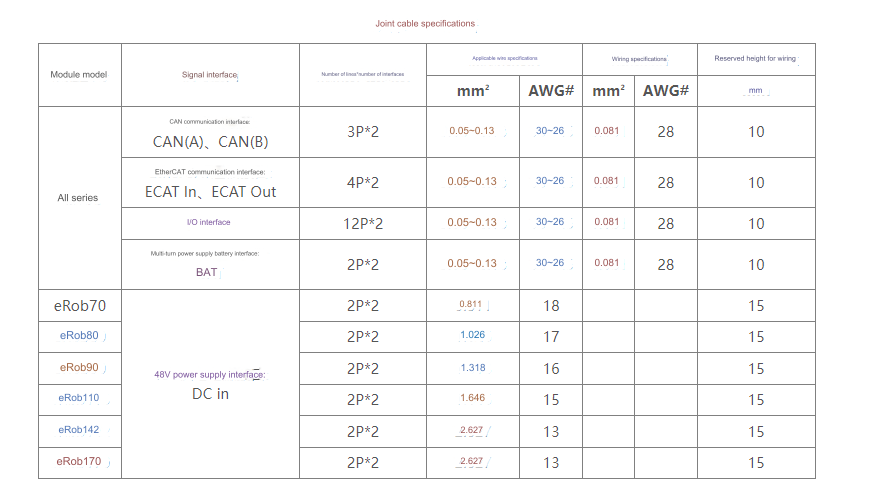
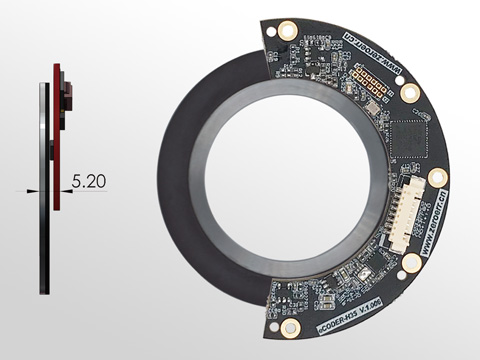
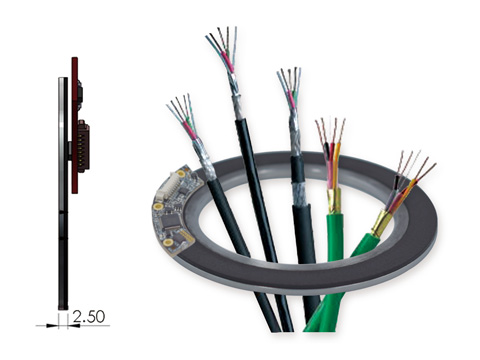
19. ¿Cuáles son las especificaciones de los cables y las alturas de reserva de cableado para los módulos de articulación del robot eRob?

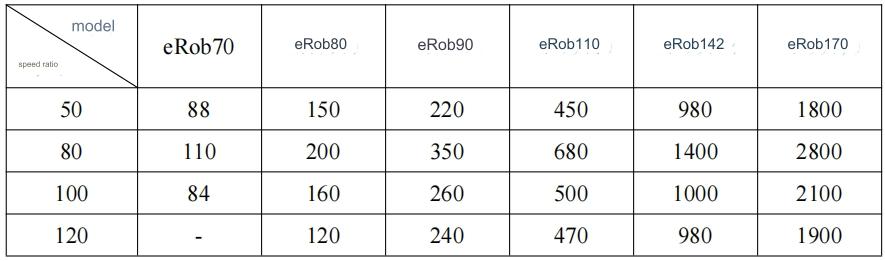
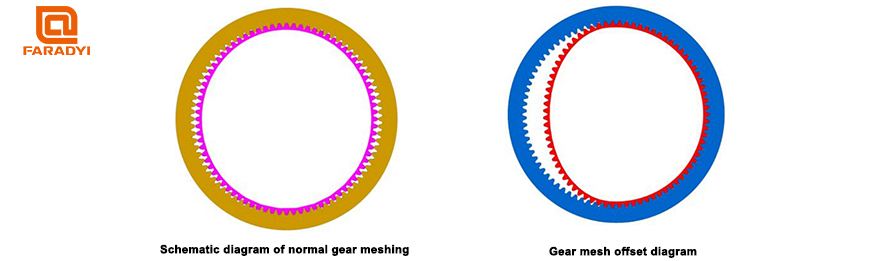
20. ¿Qué es el fenómeno del cogging?
En un módulo de articulación de robot, cuando se somete a un par de impacto excesivo durante la operación, el acoplamiento entre la rueda rígida y los engranajes de la rueda flexible puede cambiar momentáneamente, incluso si los componentes tales como la ranura flexible de la caja de cambios permanecen intactos. Este fenómeno se conoce como "reacción violenta". El par durante este caso se conoce como par de reacción (consulte los valores en la tabla a continuación). Si el fenómeno del juego persiste durante el funcionamiento, las partículas de desgaste generadas por el juego pueden provocar un desgaste prematuro de los engranajes, reduciendo así la vida útil de los cojinetes de transmisión armónica.
Es crucial abordar y mitigar los problemas de juego rápidamente para evitar un funcionamiento prolongado en tales condiciones, minimizando el impacto en la longevidad de los engranajes y el rendimiento armónico de los rodamientos de transmisión.
El engrane normal de los engranajes se muestra en el diagrama inferior izquierdo. Cuando se activa una garra, los engranajes pueden engranar de manera anormal, como se muestra en el diagrama inferior derecho, con un desplazamiento unilateral. Continuar el funcionamiento en este estado puede provocar vibraciones que dañen el engranaje flexible.
21. ¿Cómo conectar módulos de unión usando TwinCAT?
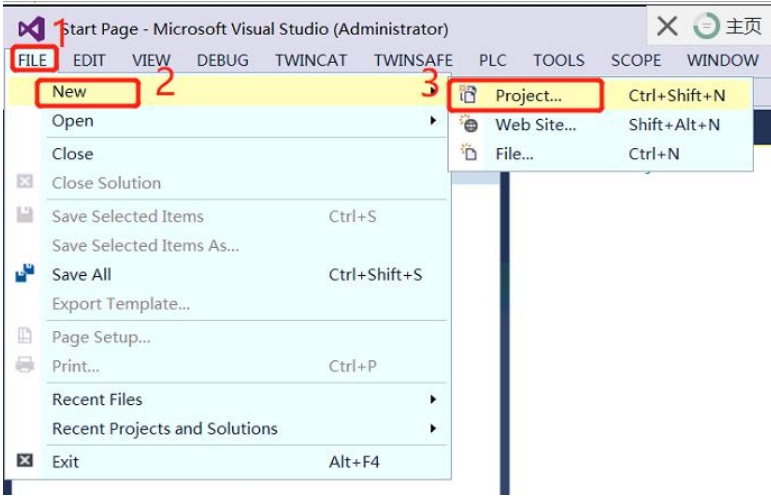
1. Como se muestra en la Figura 1, abra la barra de menú Archivo->Nuevo->Proyecto y cree un nuevo proyecto TwinCAT.
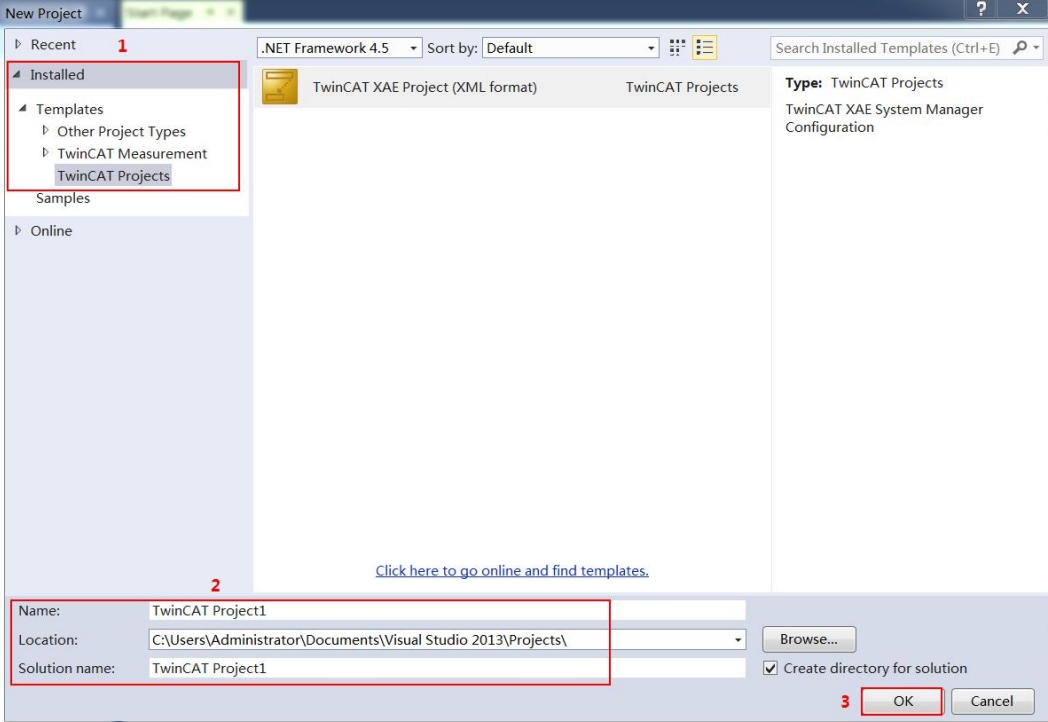
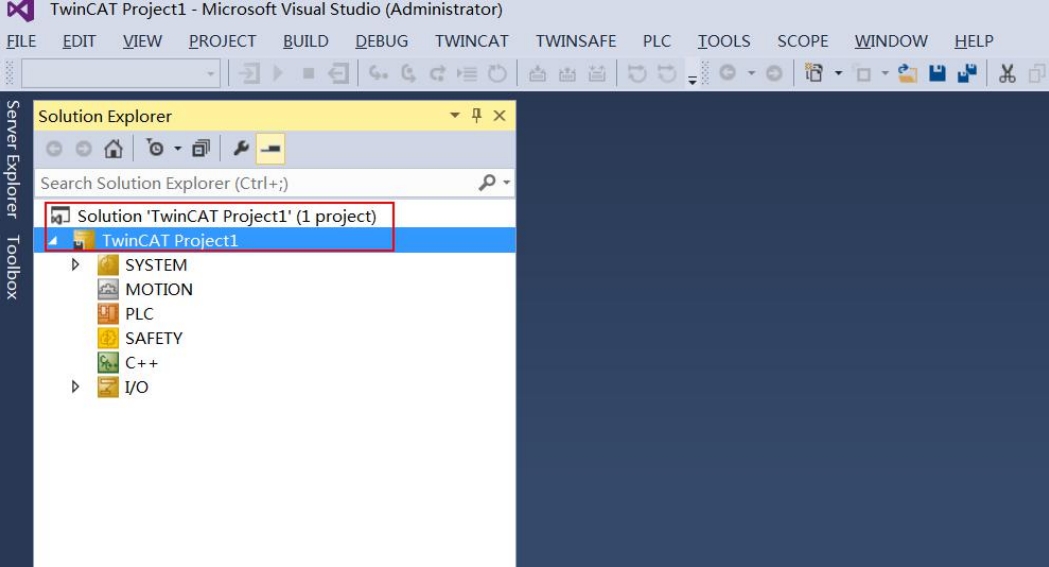
2. Aparece la ventana Nuevo proyecto (como se muestra en la Figura 2), seleccione Instalado->Plantillas->Proyectos TwinCAT a la derecha, nombre el proyecto en inglés (Nombre), seleccione la ruta de almacenamiento del proyecto (Ubicación) y haga clic en "Aceptar". ”para crear un nuevo Se creó un proyecto llamado “TwinCAT Project1” (Figura 3).
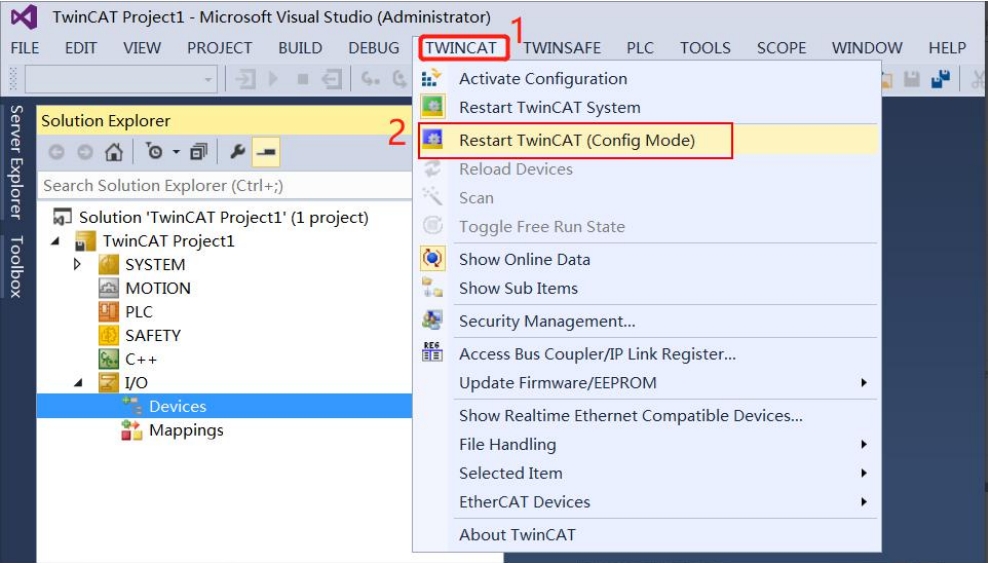
3. Como se muestra en la Figura 4, haga clic en TwinCAT->Reiniciar TwinCAT (modo de configuración) en la barra de menú. Aparecerá la ventana de Microsoft Viusal Studio (Figura 5) y haga clic en el botón "Aceptar".

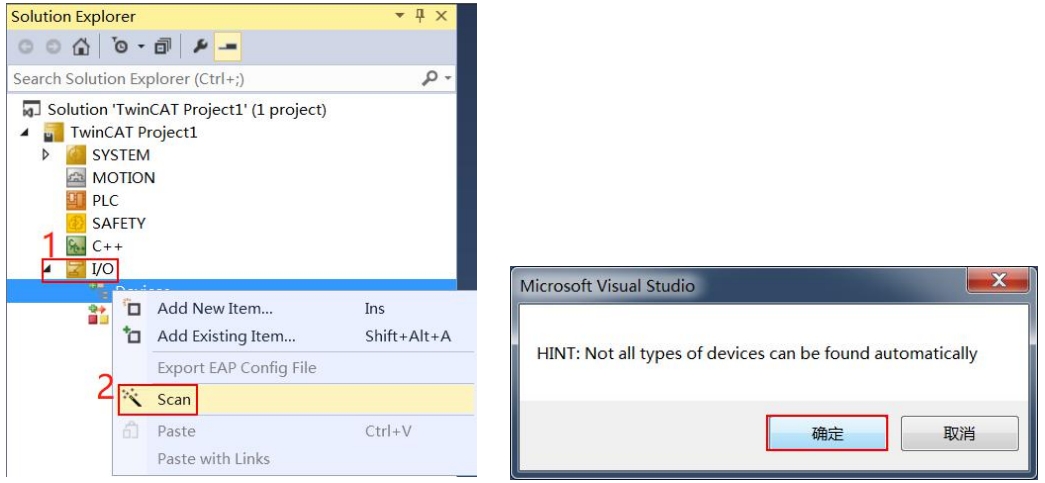
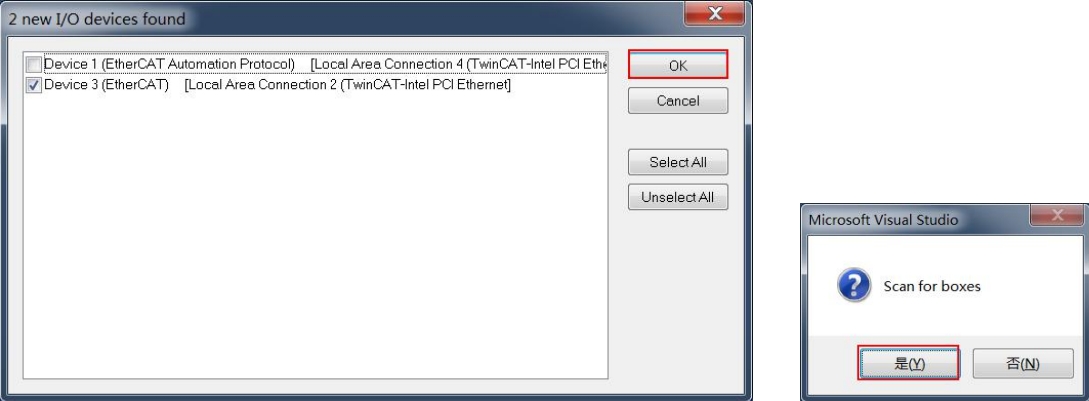
4. Como se muestra en la Figura 6, seleccione E/S en el directorio del proyecto, haga clic derecho en Dispositivos->Escanear, aparecerá la ventana de Microsoft Viusal Studio (como se muestra en la Figura 7) y haga clic en el botón "Aceptar". Aparece la ventana "nuevos dispositivos de E/S encontrados" (como se muestra en la Figura 8) y el dispositivo seleccionado automáticamente es el dispositivo esclavo escaneado (si el dispositivo seleccionado automáticamente no se muestra, significa que el dispositivo esclavo no ha sido escaneado). , y es necesario confirmar que el estado de funcionamiento del dispositivo y la conexión del cable de red son normales), haga clic en el botón "Aceptar". Simplemente haga clic en el botón "Aceptar" o "Sí" en las ventanas emergentes posteriores (Figura 9 ~ Figura 11).

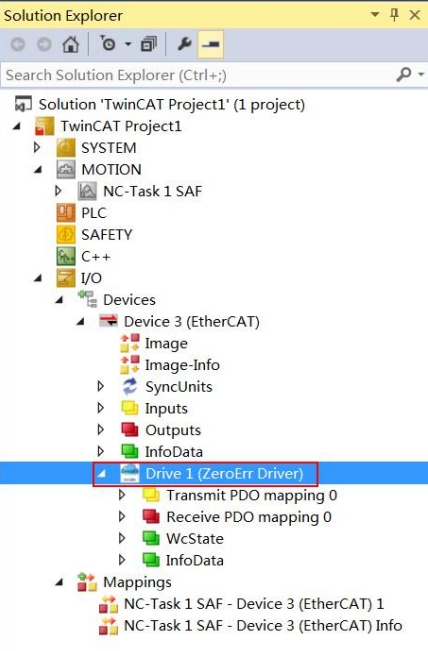
5. En este punto, como se muestra en la Figura 12, el ícono del logotipo del controlador ZeroErr y el nombre del dispositivo esclavo Drive1 (controlador Zerror) aparecen debajo de la ruta IO/Dispositivos del proyecto “TwinCAT Project1”, lo que indica que la estación maestra escaneó y conectó exitosamente el servocontrolador; de lo contrario, es necesario confirmar el servocontrolador. Si el archivo XML correspondiente y su ruta de ubicación son correctos.
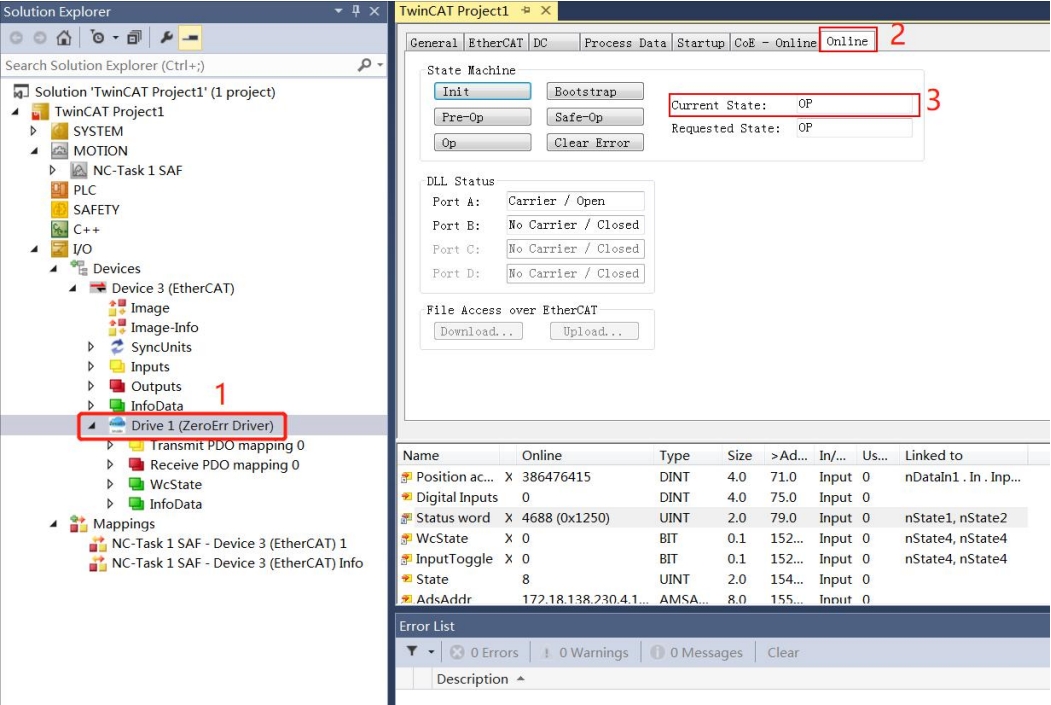
6. Como se muestra en la Figura 13, haga clic en el nombre del dispositivo Drive1 (Controlador Zerror), haga clic en "En línea" para ver el estado de la máquina de estado de EtherCAT. Si el estado actual muestra "OP", significa que el controlador ingresa al modo OP normalmente.
1. ¿Qué es un codificador magnético?
El principio de un codificador magnético es similar al de un codificador óptico, pero utiliza señales de campo magnético. Dentro del codificador magnético hay un disco magnético y un sensor magnetorresistivo. La rotación del disco magnético provoca un cambio en la intensidad del campo magnético interno, que es detectado por el sensor magnetorresistivo. Luego, la señal se procesa a través del circuito para generar la señal de salida. La resolución del codificador magnético está determinada por la cantidad de polos magnéticos en el disco magnético, la cantidad de sensores magnetorresistivos y el método de procesamiento de la señal. Una ventaja de utilizar principios de campo magnético para la generación de señales es que las señales magnéticas no se ven afectadas por el polvo, la humedad, las altas temperaturas o las vibraciones.

En comparación con los codificadores ópticos y de rejilla tradicionales, los codificadores magnéticos tienen características superiores como resistencia a la vibración, resistencia a la corrosión, resistencia a la contaminación, resistencia a las interferencias y un amplio rango de temperaturas. Se pueden aplicar en campos donde los codificadores ópticos tradicionales pueden no ser adecuados. La serie de codificadores de Faradyi Motors sigue siendo aplicable en entornos hostiles, como áreas contaminadas con aceite, entornos de alta vibración, alta humedad y condiciones de temperatura extrema. Los codificadores magnéticos están diseñados específicamente para entornos extremos y desafiantes que exigen amplias características de temperatura, resistencia a vibraciones e impactos intensos y altos niveles de protección.
Además, nuestros codificadores magnéticos cuentan con circuitos de salida de señal confiables, métodos de instalación simples y pueden reducir significativamente las pérdidas por tiempo de inactividad. Normalmente utilizados en maquinaria de metalurgia, fabricación de papel y carpintería, los codificadores magnéticos de alto rendimiento encuentran amplias aplicaciones en control industrial, fabricación mecánica, barcos, textiles, impresión, radar, comunicaciones y otros campos.
Faradyi Motors diseña y produce codificadores magnéticos de forma independiente. Nuestros codificadores magnéticos son conocidos por su estructura simple y compacta, sin puntos de contacto, larga vida útil, resistencia a altas y bajas temperaturas, resistencia a vibraciones, velocidad de respuesta rápida y resistencia a los efectos del polvo y la condensación. Son ampliamente utilizados por los clientes en áreas como robótica, líneas de producción automatizadas, máquinas de ensamblaje, ascensores, maquinaria textil, máquinas de coser, maquinaria de embalaje e impresión, máquinas herramienta CNC, trazadores, instrumentos de medición de ángulos y más.
2. ¿Ventajas de los codificadores rotatorios multivueltas?
3. ¿Diferencias entre codificadores incrementales y absolutos?
Un codificador se refiere a un dispositivo que codifica señales o datos, convirtiéndolos en señales que pueden usarse para comunicación, transmisión y almacenamiento. Se pueden clasificar en dos tipos principales: codificadores incrementales y absolutos, con amplias aplicaciones en nuestra producción y vida diaria.
Clasificación de codificadores:
-
Codificador incremental: Los codificadores incrementales utilizan el principio de conversión fotoeléctrica para generar tres conjuntos de pulsos de onda cuadrada: fases A, B y Z. Las fases de pulso A y B tienen una diferencia de fase de 90 grados, lo que permite determinar fácilmente la dirección de rotación. La fase Z proporciona un pulso por cada revolución completa, sirviendo como punto de referencia para el posicionamiento. Sus ventajas incluyen un principio de construcción simple, una vida útil mecánica que supera las decenas de miles de horas, una gran capacidad antiinterferente, alta confiabilidad e idoneidad para transmisiones a larga distancia. Sin embargo, no puede generar información de posición absoluta de la rotación del eje.
-
Codificador absoluto: Los codificadores absolutos emiten directamente señales digitales. Ya sea en entornos industriales o aplicaciones exteriores hostiles, mejorar la eficiencia, la confiabilidad y la durabilidad es crucial. Por lo tanto, los componentes del codificador deben cumplir varios requisitos y al mismo tiempo garantizar la máxima durabilidad y una mayor rentabilidad. Los codificadores magnéticos absolutos multivuelta de la serie eCoder presentados por ZeroDifference Cloud Control han superado las pruebas en las condiciones ambientales más duras del mundo. Estos codificadores combinan robustez confiable, precisión ultraalta y tecnología de comunicación avanzada, lo que abre una amplia gama de áreas de aplicación muy atractivas.
-
Codificador absoluto híbrido: El codificador absoluto híbrido genera dos conjuntos de información: un conjunto para detectar posiciones polares magnéticas con funcionalidad de información absoluta y el otro conjunto idéntico a la información de salida de los codificadores incrementales.
4. ¿Qué es un codificador hueco?
Los codificadores huecos Faradyi cuentan con un orificio central de diámetro máximo de hasta 83 mm, lo que les permite pasar fácilmente a través de estructuras mecánicas, cables, sistemas neumáticos y más.
Codificadores huecos Faradyi
Con un diseño ultrafino y fijación o bloqueo mediante placas de resorte, estos codificadores no requieren accesorios adicionales durante la instalación. También proporcionan absorción de impactos, asegurando la coaxialidad. Ampliamente utilizados en aplicaciones que exigen alta precisión y espacios compactos, son particularmente adecuados para su uso con motores de accionamiento directo de CC.
Los centros de soporte de precisión personalizables facilitan una instalación rápida y precisa.
Cuando se combinan con los variadores integrados en miniatura de Faradyi Motors, permiten un servocontrol compacto.
Las aplicaciones incluyen equipos médicos, articulaciones de robots, automatización general y máquinas herramienta con motor DD, entre otros campos.
5. Uso del codificador: ¿Cómo calcular el ángulo de rotación?
6. ¿Cómo leer el valor de salida de posición completa del codificador?
7. ¿Causas de daños en el disco codificador?
8. ¿Cómo instalar un disco codificador de tipo dividido?
9. ¿Qué se debe tener en cuenta al almacenar y utilizar codificadores eCoder?
Precauciones para el uso del codificador:
-
Mantener alejado de materiales magnéticos:
- Evite acercar la parte magnética del disco codificador a materiales con un campo magnético para evitar daños a las pistas magnéticas del disco codificador.
-
Evite la exposición a campos magnéticos:
- No exponga la parte magnética del disco codificador a un campo magnético con una intensidad superficial superior a 20 mT, ya que esto podría provocar daños permanentes al disco codificador.
-
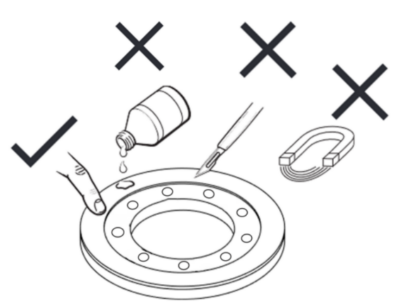
Evite impactos en el anillo magnético:
- Durante la instalación o almacenamiento del disco codificador, tenga cuidado de no impactar la superficie donde se encuentra el anillo magnético. Asegúrese de que el anillo magnético no se raye. No utilice líquidos corrosivos para limpiar el disco del codificador. Si hay residuos en la superficie, elimínelos suavemente con una cinta de papel sin rastro.
-
Proteja el cabezal de lectura:
- Tome precauciones para proteger el cabezal de lectura para evitar el riesgo de que caigan limaduras de hierro directamente sobre él, ya que esto podría dañar los componentes.
-
Conciencia sobre la electricidad estática:
- El cabezal de lectura es sensible a la electricidad estática. Sin la protección electrostática adecuada o en un entorno no controlado, no toque los circuitos electrónicos, los cables o las áreas de los sensores directamente con las manos.
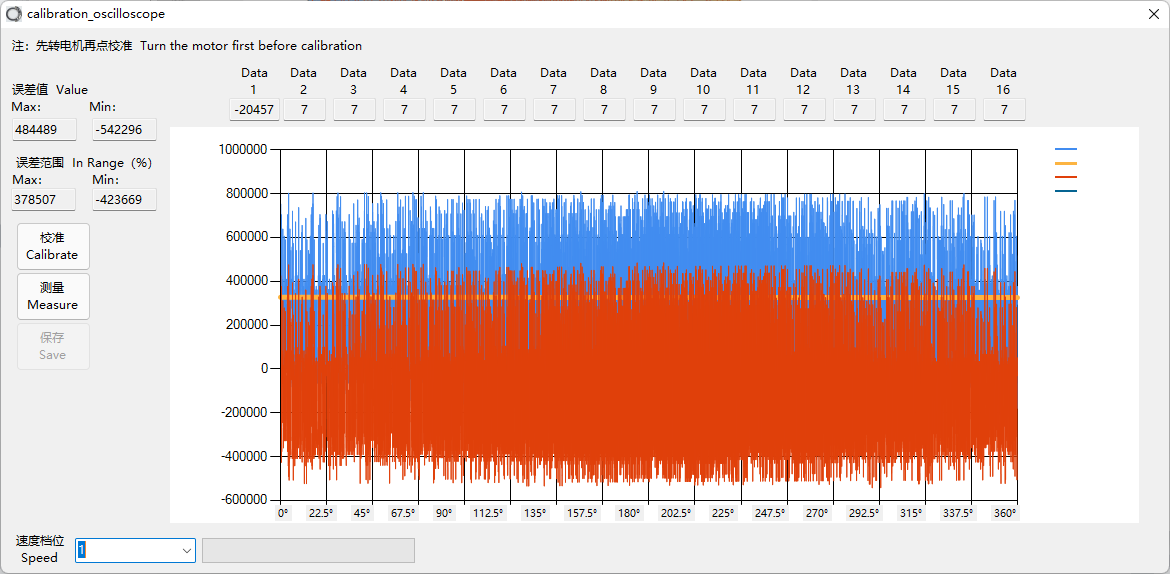
10. ¿Cuáles son las fallas de calibración comunes de los codificadores eCoder?
Fallo de calibración: escenarios comunes
- El error general excede la tolerancia:
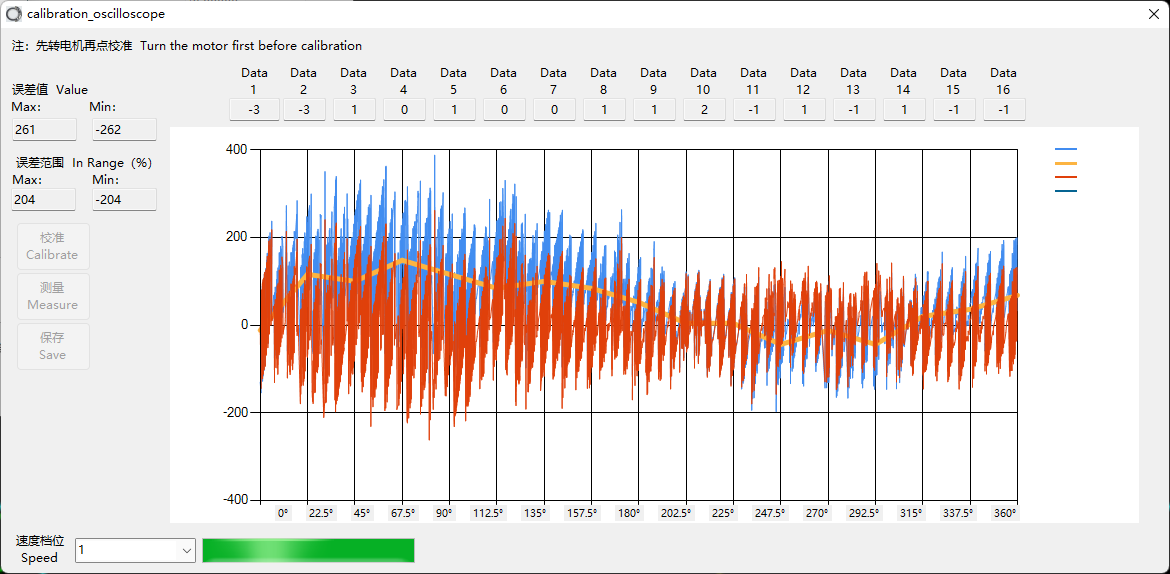
Generalmente, esta forma de onda se produce debido a una instalación estructural. Verifique o reajuste la distancia de instalación entre el cabezal de lectura y el disco de códigos. Consulte las instrucciones de instalación mecánica.
2. Posibles causas de los picos de forma de onda:
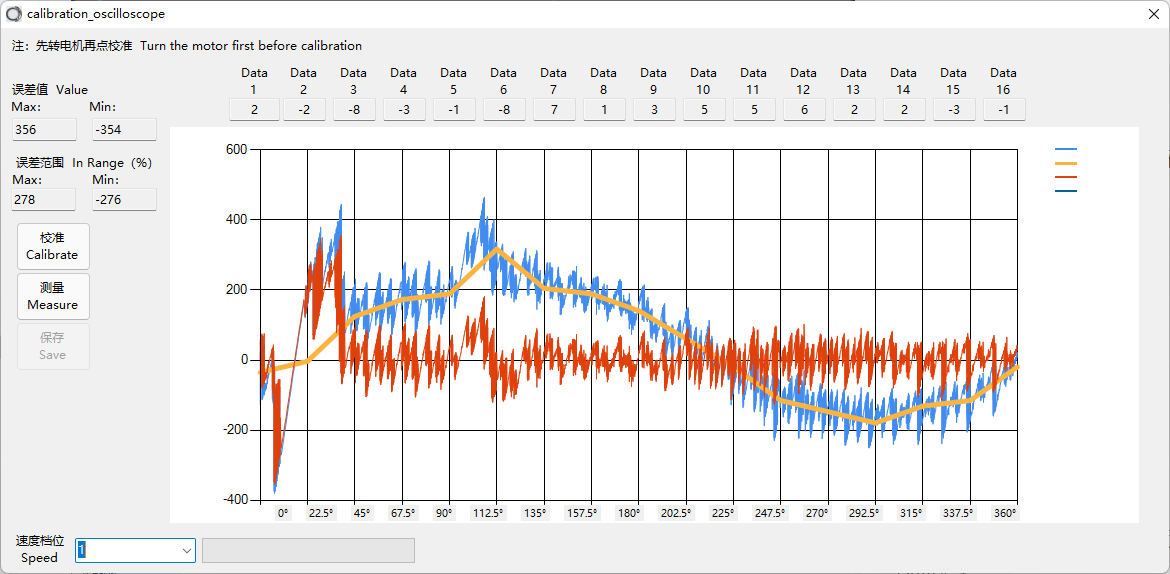
3. Posibles causas de formas de onda anormales: