







1. How to select the power supply for the robot?

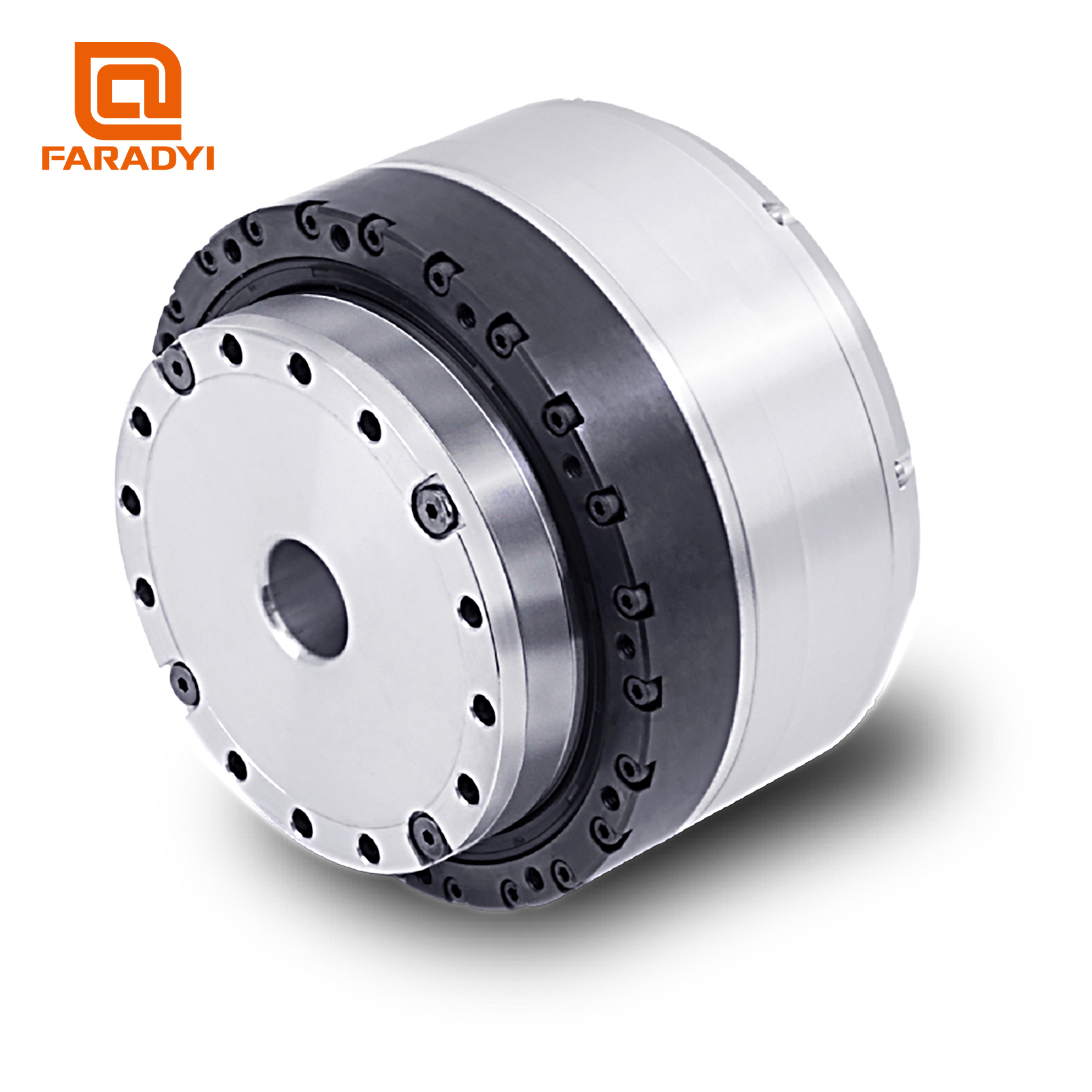
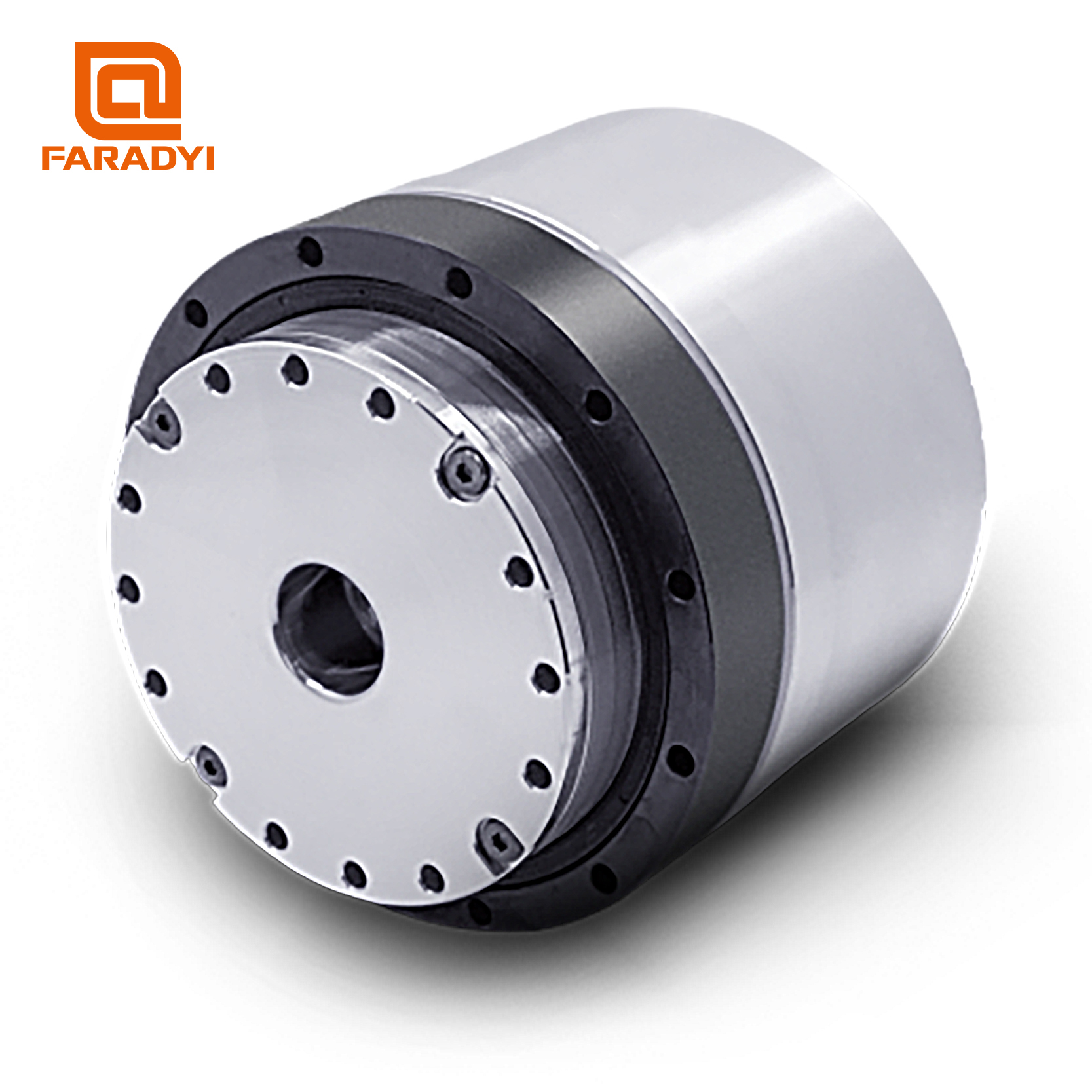
2. What are the differences between single-turn and multi-turn joint modules?
3. How high is the accuracy of robot joints?
4. How is the operational noise of robot joint modules?
5. The motor cannot reach the target position correctly.
6. Bus voltage is below the minimum allowed voltage setting.
7. Bus voltage is above the maximum allowed voltage setting.
8. Phase currents (U/V/W) exceed the allowed peak current.
9. Trigger maximum current (cut-off).
10. Error handling: Motor 3-phase current and error.
11. Multi-turn encoder battery error at the load end.
12. Motor stall setting.
13. Position error exceeds the maximum allowed error.
14. Speed error exceeds the maximum allowed speed error.
15. Motor speed exceeds the maximum allowed speed setting.
16. What do rated torque and permissible peak torque represent?
17. What should be considered before installing joints with single-turn/multi-turn functionality?
18. How is the bending torque force calculated for eRob joint modules?
Calculation Method for Maximum Load Static Moment (Mmax):
Please confirm Mmax ≤ Mc (See formula symbols in Table 1-2).
Table 1-1 Explanation of Formula Symbols:
- Frmax: Maximum radial load (N or kgf) – Refer to the external load diagram.
- Famax: Maximum axial load (N or kgf) – Refer to the external load diagram.
- Lr, La: __ (unit not specified, possibly meters) – Refer to the external load diagram.
- R: Offset (m) – Refer to the external load diagram in the specifications table for each series.
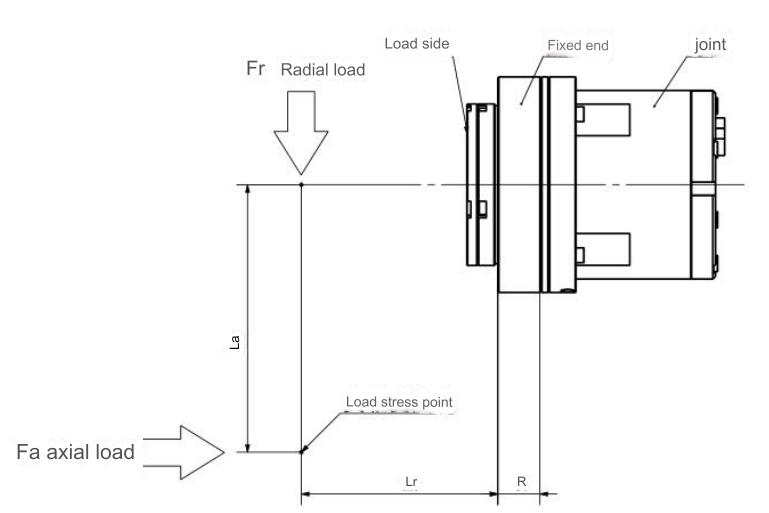
Table 1-2 Allowable Torque Values for Each Joint Type:
| Joint Type | Offset (R) | Allowable Torque Load (Mc) |
|---|---|---|
| eRob70 | 0.0217m | 74 Nm / 7.6 Kgfm |
| eRob80 | 0.0239m | 124 Nm / 12.6 Kgfm |
| eRob90 | 0.0255m | 187 Nm / 19.1 Kgfm |
| eRob110 | 0.0296m | 258 Nm / 26.3 Kgfm |
| eRob142 | 0.0364m | 580 Nm / 59.1 Kgfm |
| eRob170 | 0.044m | 849 Nm / 86.6 Kgfm |
Example: Given the selection of the eRob70H joint with La = 0.2m, Lr = 0.5m, Frmax = 50N, and Famax = 30N.
From Table 1-2, R = 0.0217m, Mc = 74 Nm.
Substitute into the formula:
Since , it satisfies the bending torque requirements.
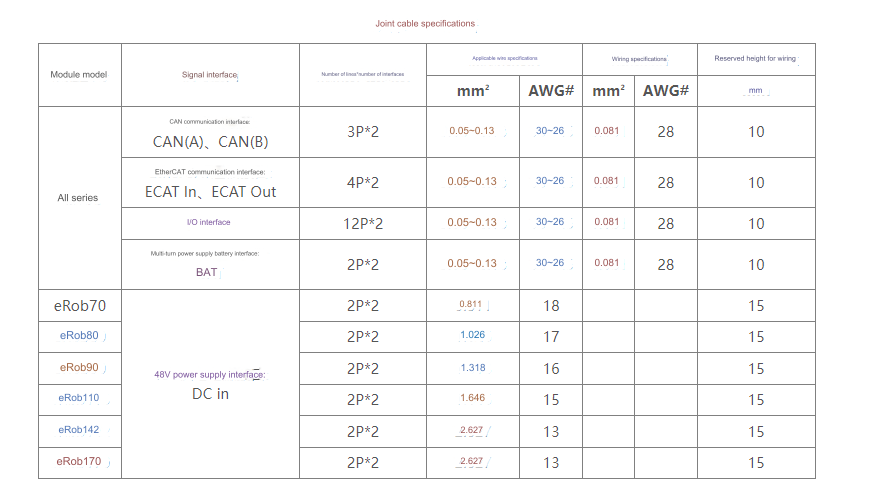
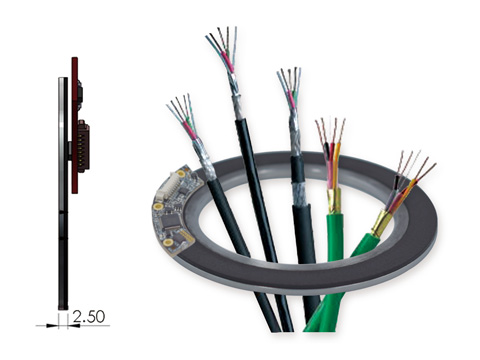
19. What are the cable specifications and wiring reserve heights for eRob robot joint modules?

20. What is the cogging phenomenon?
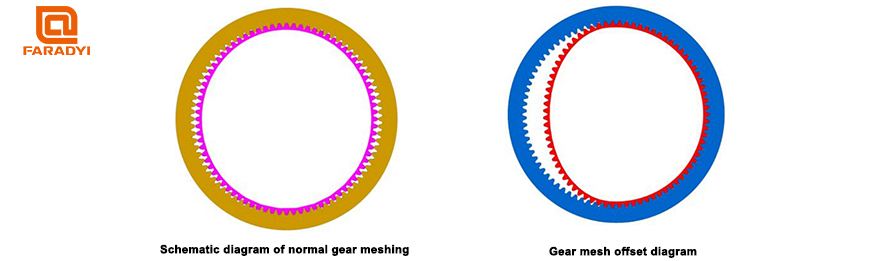
In a robot joint module, when subjected to an excessive impact torque during operation, the engagement between the rigid wheel and the flexible wheel gears may momentarily shift, even if the components such as the gearbox flex spline remain undamaged. This phenomenon is referred to as “backlash.” The torque during this occurrence is known as backlash torque (refer to the values in the table below). If the backlash phenomenon persists during operation, the generated wear particles from backlash can lead to early gear wear, thereby reducing the service life of the harmonic drive bearings.
It’s crucial to address and mitigate backlash issues promptly to prevent prolonged operation under such conditions, minimizing the impact on gear longevity and harmonic drive bearing performance.
The normal meshing of gears is shown in the lower left diagram. When a dog is engaged, the gears may mesh abnormally, as depicted in the lower right diagram, with a single-sided offset. Continuing operation in this state can result in vibrations, leading to damage to the flexible gear.
21. How to connect joint modules using TwinCAT?
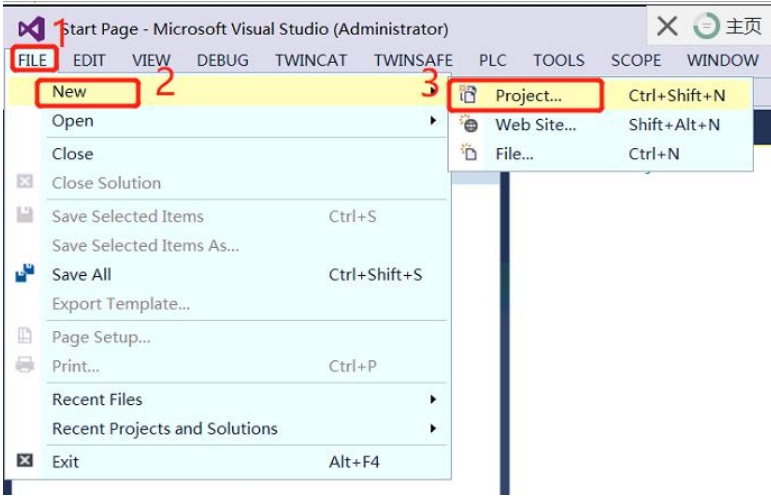
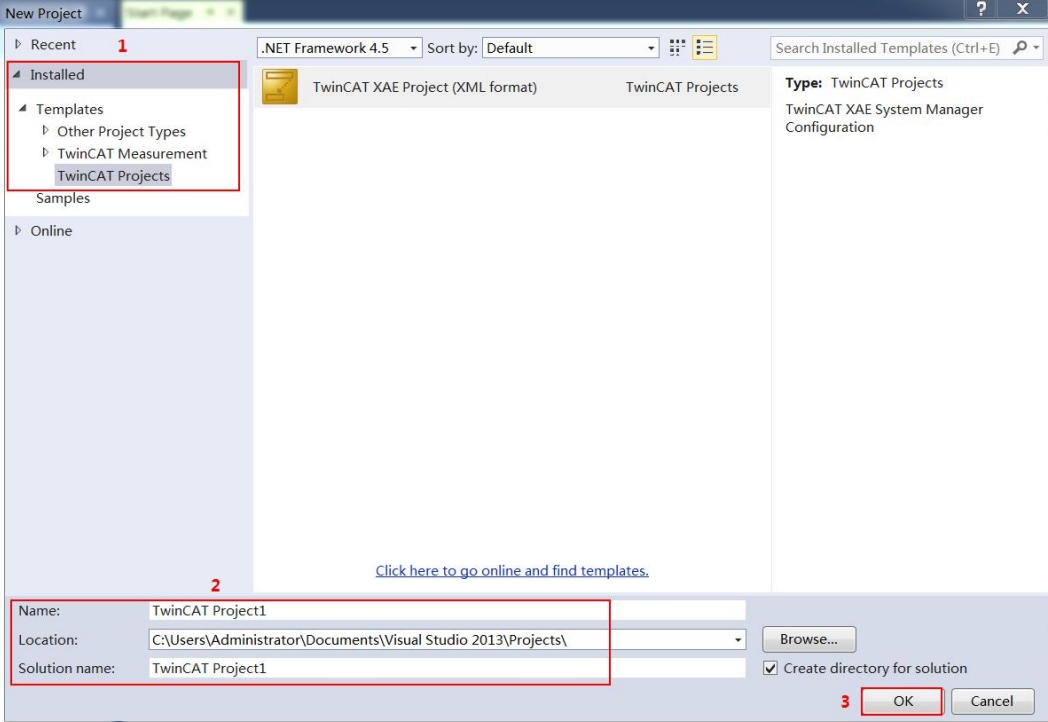
1. As shown in Figure 1, open the menu bar File->New->Project and create a new TwinCAT project.
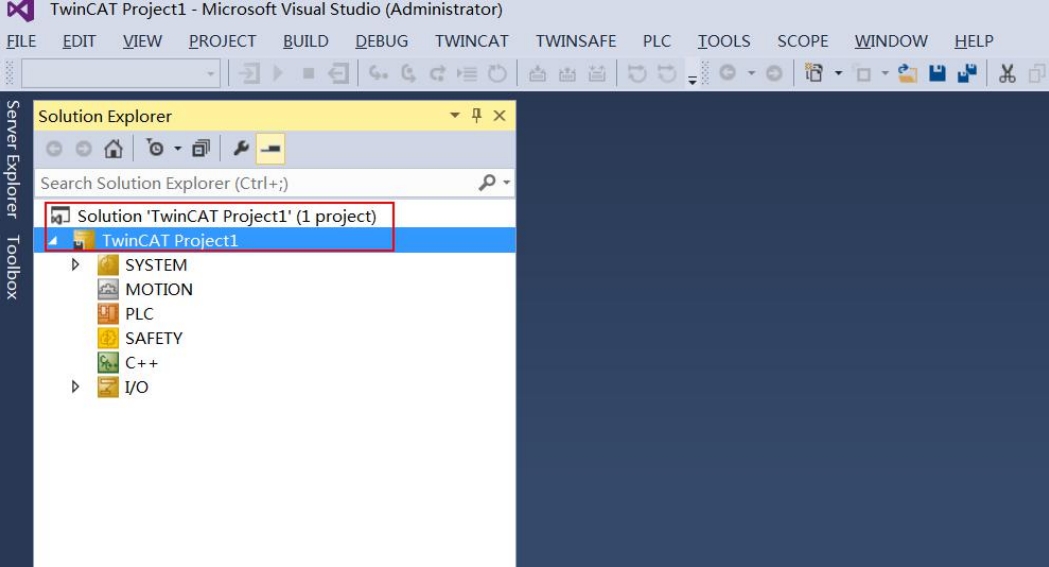
2. The New Project window pops up (as shown in Figure 2), select Installed->Templates->TwinCAT Projects on the right, name the project in English (Name), select the project storage path (Location), and click the “OK” button to create a new A project named “TwinCAT Project1” was created (Figure 3).
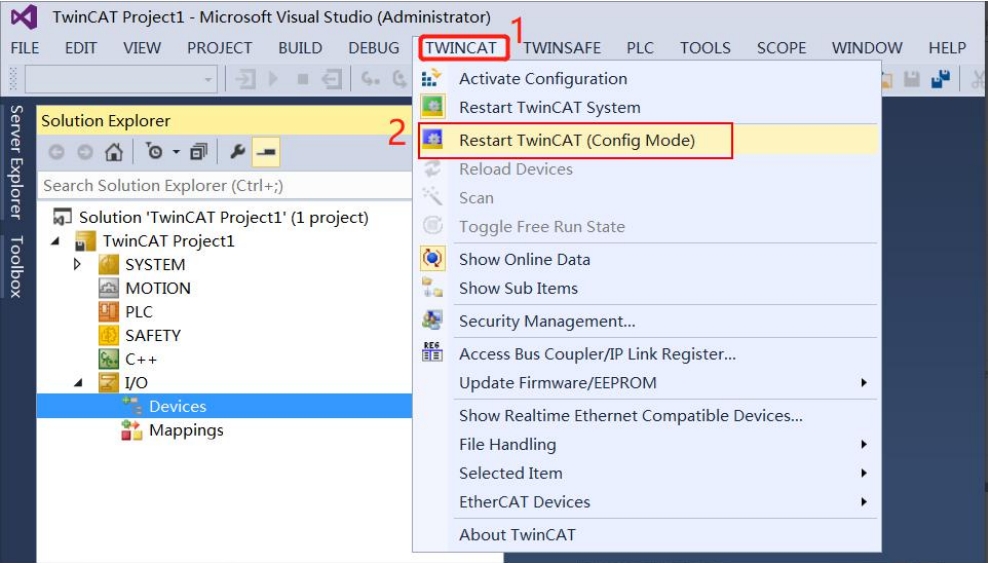
3. As shown in Figure 4, click TwinCAT->Restart TwinCAT (Config Mode) in the menu bar. The Microsoft Viusal Studio window will pop up (Figure 5), and click the “OK” button.

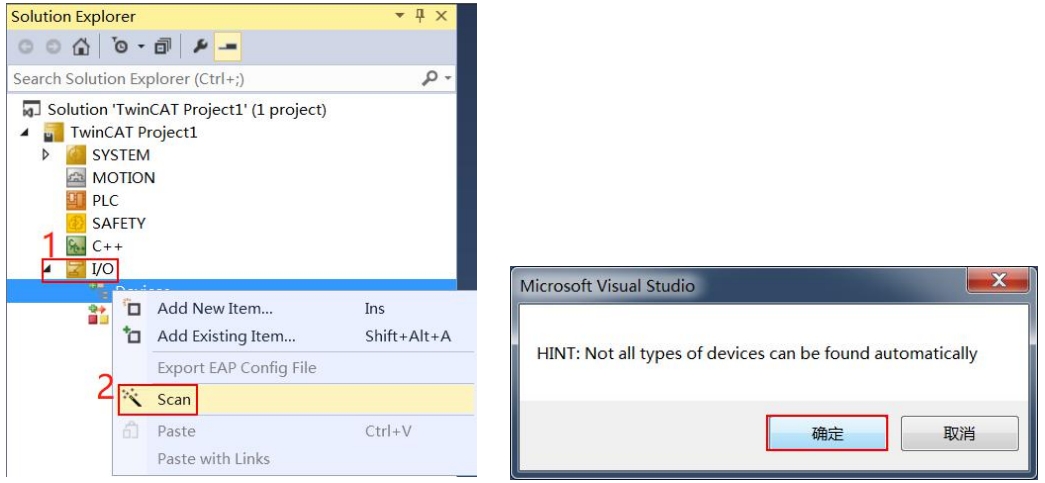
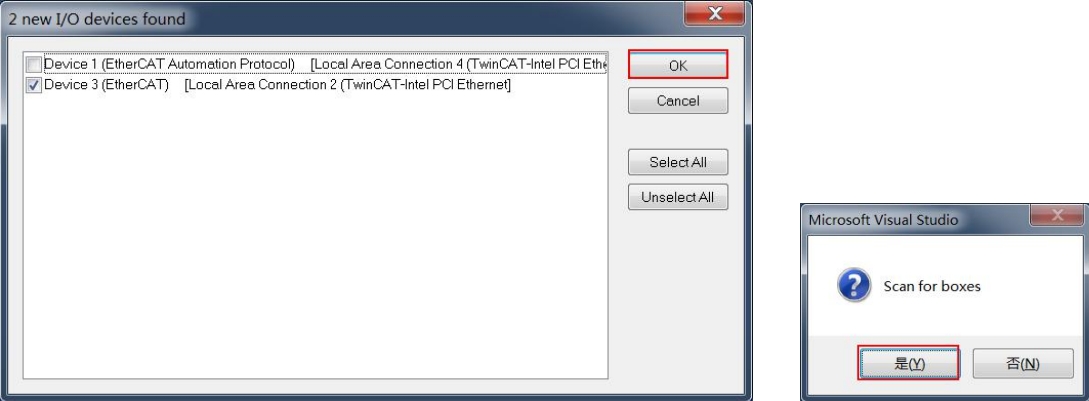
4. As shown in Figure 6, select I/O in the project directory, right-click Devices->Scan, the Microsoft Viusal Studio window will pop up (as shown in Figure 7), and click the “OK” button. The “new I/O devices found” window pops up (as shown in Figure 8), and the automatically selected device is the scanned slave device (if the automatically selected device is not displayed, it means that the slave device has not been scanned, and the device needs to be confirmed. running status and network cable connection are normal), click the “OK” button. Just click the “OK” or “Yes” button in subsequent pop-up windows (Figure 9~Figure 11).

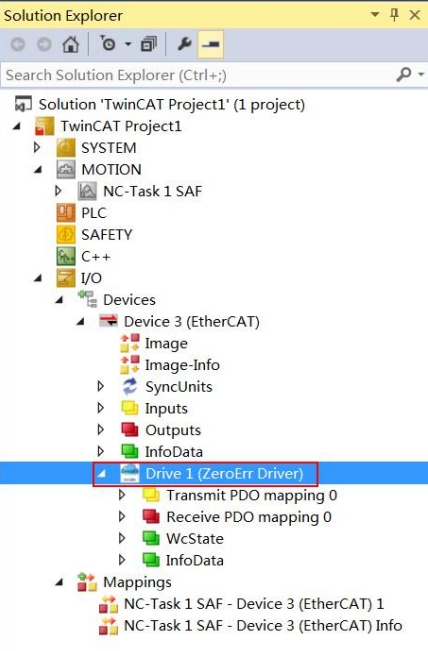
5. At this point, as shown in Figure 12, the ZeroErr Driver logo icon and the slave device name Drive1 (Zerror Driver) appear under the IO/Devices path of the “TwinCAT Project1” project, indicating that the master station successfully scanned and connected the servo driver, otherwise the servo drive needs to be confirmed. Whether the corresponding XML file and its placement path are correct.
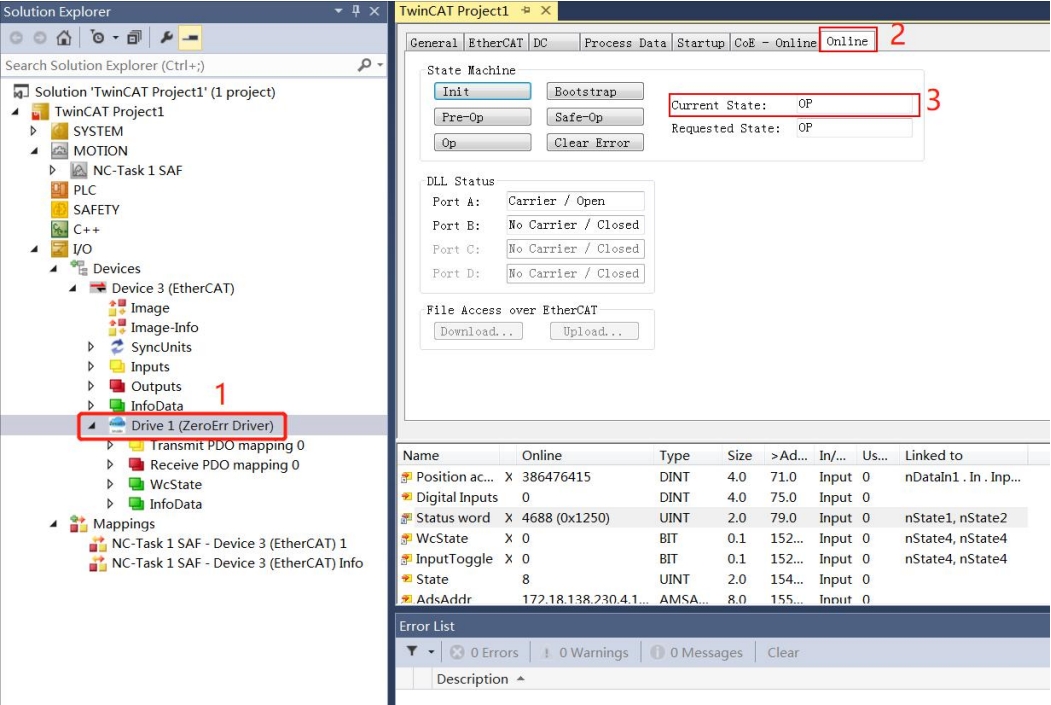
6. As shown in Figure 13, click the device name Drive1 (Zerror Driver), click “Online” to view the state machine status of EtherCAT. If the Current State displays “OP”, it means the driver enters OP mode normally.
1. What is a magnetic encoder?
The principle of a magnetic encoder is similar to that of an optical encoder, but it utilizes magnetic field signals. Inside the magnetic encoder, there is a magnetic disc and a magnetoresistive sensor. The rotation of the magnetic disc causes a change in the internal magnetic field strength, which is detected by the magnetoresistive sensor. The signal is then processed through the circuit to generate the output signal. The resolution of the magnetic encoder is determined by the number of magnetic poles on the magnetic disc, the quantity of magnetoresistive sensors, and the signal processing method. One advantage of using magnetic field principles for signal generation is that magnetic signals are not affected by dust, humidity, high temperatures, or vibrations.

Compared to traditional optical and grating encoders, magnetic encoders have superior characteristics such as vibration resistance, corrosion resistance, pollution resistance, interference resistance, and a wide temperature range. They can be applied in fields where traditional optical encoders may not be suitable. The Faradyi Motors encoder series remains applicable in harsh environments such as oil-contaminated areas, high vibration environments, high humidity, and extreme temperature conditions. Magnetic encoders are specifically designed for extreme and challenging environments that demand broad temperature characteristics, resistance to intense vibration and impact, and high protection levels.
Furthermore, our magnetic encoders feature reliable signal output circuits, simple installation methods, and can significantly reduce downtime losses. Typically used in metallurgy, papermaking, and woodworking machinery, high-performance magnetic encoders find extensive applications in industrial control, mechanical manufacturing, ships, textiles, printing, radar, communication, and other fields.
Faradyi Motors independently designs and produces magnetic encoders. Our magnetic encoders are known for their simple and compact structure, no contact points, long lifespan, resistance to high and low temperatures, vibration resistance, quick response speed, and resilience to the effects of dust and condensation. They are widely utilized by customers in areas such as robotics, automated production lines, assembly machines, elevators, textile machinery, sewing machines, packaging and printing machinery, CNC machine tools, plotters, angle measuring instruments, and more.
2. Advantages of multi-turn rotary encoders?
3. Differences between incremental and absolute encoders?
An encoder refers to a device that encodes signals or data, converting them into signals that can be used for communication, transmission, and storage. It can be classified into two main types: incremental and absolute encoders, with wide applications in our production and daily life.
Classification of Encoders:
-
Incremental Encoder: Incremental encoders utilize the photoelectric conversion principle to output three sets of square wave pulses—A, B, and Z phases. The A and B pulse phases have a 90-degree phase difference, allowing for easy determination of the rotation direction. The Z phase provides a pulse for each full revolution, serving as a reference point for positioning. Its advantages include a simple construction principle, mechanical lifespan exceeding tens of thousands of hours, strong anti-interference ability, high reliability, and suitability for long-distance transmission. However, it cannot output the absolute position information of the shaft’s rotation.
-
Absolute Encoder: Absolute encoders directly output digital signals. Whether in industrial environments or harsh outdoor applications, enhancing efficiency, reliability, and durability is crucial. Therefore, encoder components must meet various requirements while ensuring maximum durability and higher cost-effectiveness. The eCoder series magnetic absolute multi-turn encoders introduced by ZeroDifference Cloud Control have passed tests under the world’s harshest environmental conditions. These encoders combine reliable robustness, ultra-high precision, and advanced communication technology, opening up a wide range of highly attractive application areas.
-
Hybrid Absolute Encoder: The hybrid absolute encoder outputs two sets of information: one set for detecting magnetic pole positions with absolute information functionality, and the other set identical to the output information of incremental encoders.
4. What is a hollow encoder?
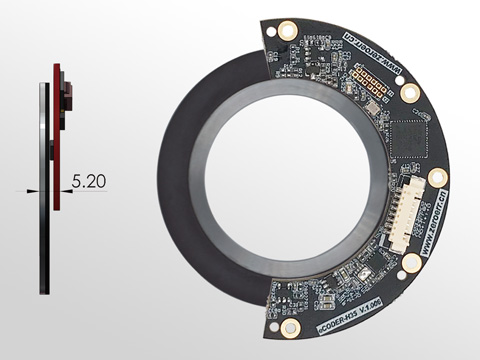
Faradyi Hollow Encoders feature a maximum diameter center hole of up to 83mm, allowing them to easily pass through mechanical structures, cables, pneumatic systems, and more.
Faradyi Hollow Encoders
With an ultra-thin design and fixation or locking by spring plates, these encoders require no additional accessories during installation. They also provide shock absorption, ensuring coaxiality. Widely used in applications demanding high precision and compact spaces, they are particularly suitable for use with DC direct-drive motors.
Customizable precision support hubs facilitate quick and precise installation.
When combined with Faradyi Motors miniature embedded drives, they enable compact servo control.
Applications include medical equipment, robot joints, general automation, and DD motor machine tools, among other fields.
5. Encoder usage: How to calculate the rotation angle?
6. How to read the full position output value of the encoder?
7. Causes of encoder disc damage?
8. How to install a split-type encoder disc?
9. What should be considered when storing and using eCoder encoders?
Precautions for Encoder Usage:
-
Keep Away from Magnetic Materials:
- Avoid bringing the magnetic portion of the encoder disk close to materials with a magnetic field to prevent damage to the magnetic tracks on the encoder disk.
-
Avoid Exposure to Magnetic Fields:
- Do not expose the magnetic portion of the encoder disk to a magnetic field with a surface intensity greater than 20mT, as this could result in permanent damage to the encoder disk.
-
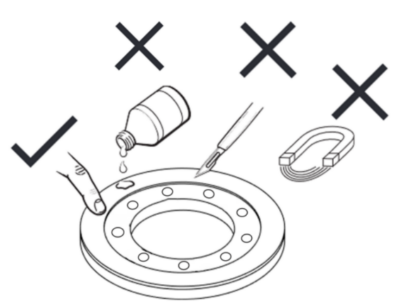
Avoid Impact on the Magnetic Ring:
- During installation or storage of the encoder disk, be careful not to impact the surface where the magnetic ring is located. Ensure that the magnetic ring is not scratched. Do not use corrosive liquids to clean the encoder disk. If there are debris on the surface, gently remove them using a traceless paper tape.
-
Protect the Read Head:
- Take precautions to protect the read head to avoid the risk of iron filings falling directly onto it, as this could damage the components.
-
Static Electricity Awareness:
- The read head is sensitive to static electricity. Without proper electrostatic protection or in an uncontrolled environment, do not touch the electronic circuits, wires, or sensor areas directly with hands.
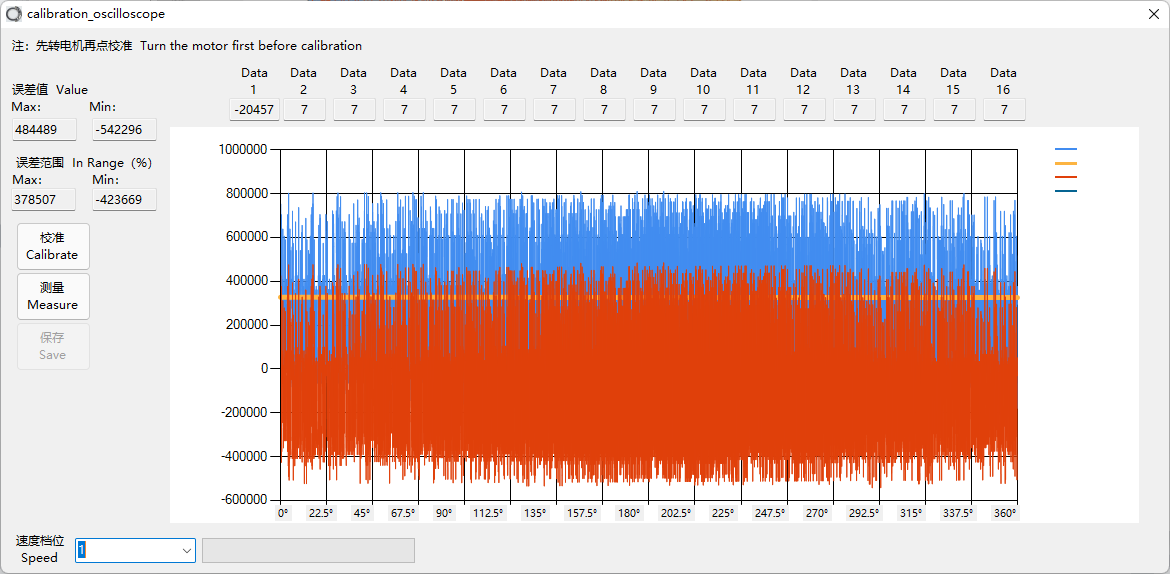
10. What are the common calibration failures of eCoder encoders?
Calibration Failure: Common Scenarios
- Overall Error Exceeds Tolerance:
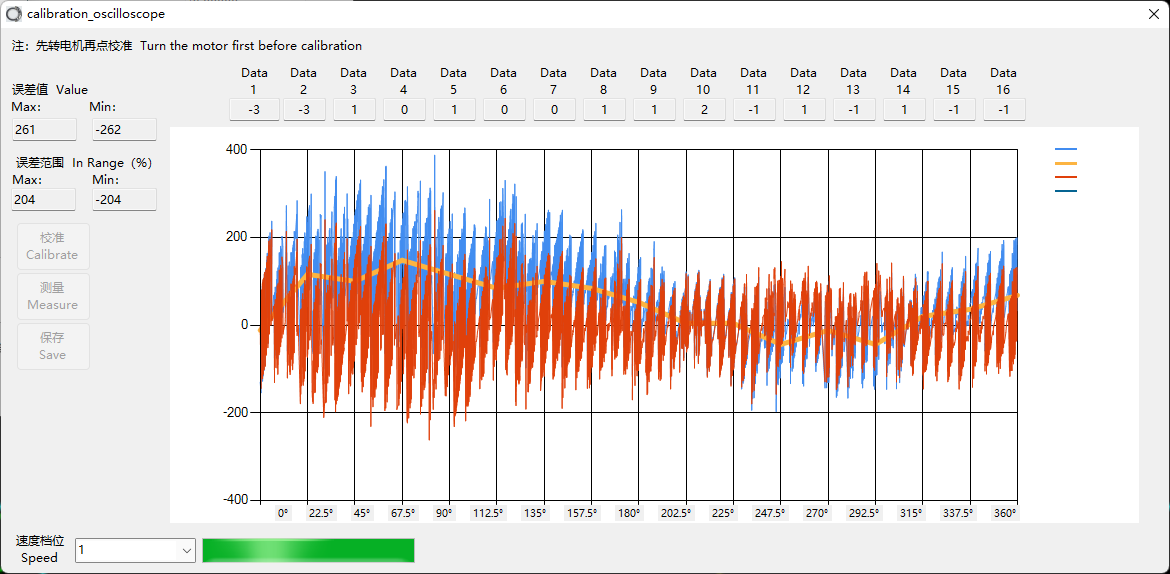
Generally, this waveform occurs due to structural installation. Check or readjust the installation distance between the read head and the code disk. Refer to the mechanical installation instructions.
2. Possible causes for the waveform spikes:
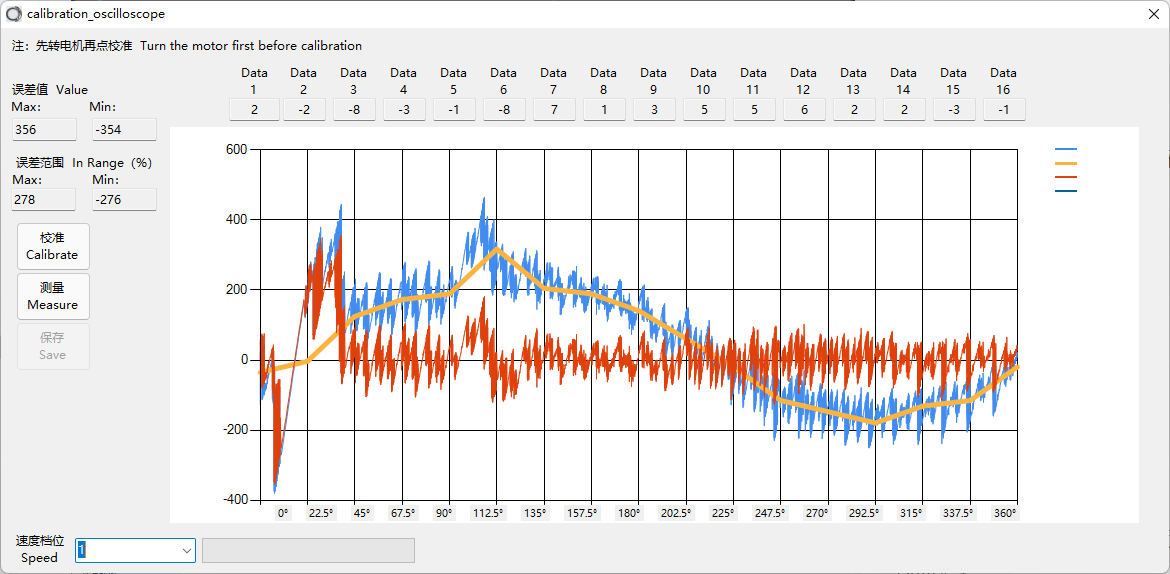
3. Possible causes for abnormal waveforms: