- (+086) 18923470557
- [email protected]
- 7F, No.53 Fofu Road, ciudad de Dalang, ciudad de Dongguan, Guangdong, CN, 523770






Con protocolos de comunicación EtherCAT, CANopen, Modbus.
Posición, velocidad, bucle de corriente PID ajustable en tiempo real.
Entrada analógica incorporada ± 10V.
Pulso y dirección, E/S, RS485,
Codificador externo e interfaz STO,
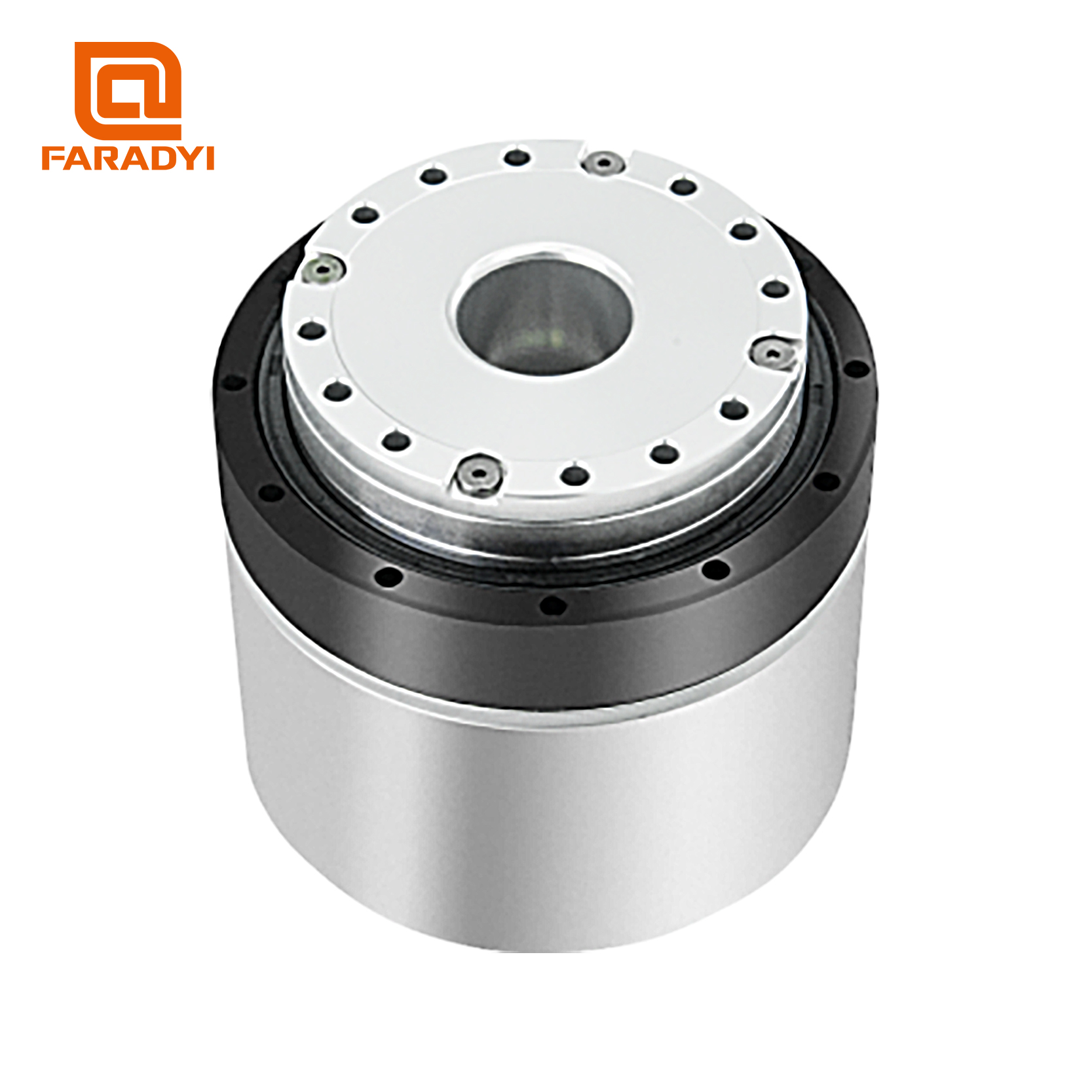
Todo en el espacio de DxL=70x67mm
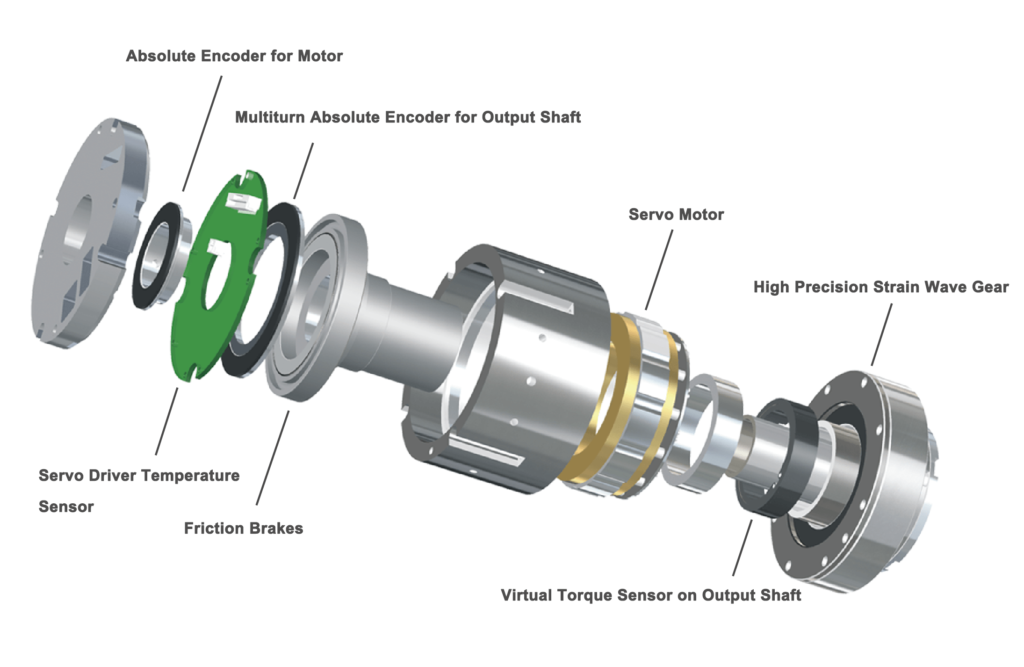
Codificador absoluto multivuelta de 19 bits para eje de salida.
Repetibilidad hasta ±7 segundos de arco.
Precisión absoluta de hasta ±15 * segundos de arco.
Siempre tenga una posición absoluta real y un contador de vueltas múltiples cuando esté apagado.

Freno suave y estable.
Ningún espacio; Sin reacción.
No es necesario moverse cuando está encendido.
Sin desgaste.
Se puede utilizar como parada de emergencia.