1. Comment sélectionner l’alimentation électrique du robot ?

2. Quelles sont les différences entre les modules articulés monotours et multitours ?
3. Quelle est la précision des articulations du robot ?
4. Quel est le bruit de fonctionnement des modules articulés du robot ?
5. Le moteur ne peut pas atteindre correctement la position cible.
6. La tension du bus est inférieure au réglage de tension minimum autorisé.
7. La tension du bus est supérieure au réglage de tension maximum autorisé.
8. Les courants de phase (U/V/W) dépassent le courant de crête autorisé.
9. Déclenchez le courant maximum (coupure).
10. Traitement des erreurs : courant triphasé du moteur et erreur.
11. Erreur de batterie du codeur multitours côté charge.
12. Réglage du calage du moteur.
13. L'erreur de position dépasse l'erreur maximale autorisée.
14. L'erreur de vitesse dépasse l'erreur de vitesse maximale autorisée.
15. La vitesse du moteur dépasse la vitesse maximale autorisée.
16. Que représentent le couple nominal et le couple maximal autorisé ?
17. Que faut-il prendre en compte avant d'installer des joints à fonctionnalité monotour/multitours ?
18. Comment la force de couple de flexion est-elle calculée pour les modules de joint eRob ?
Méthode de calcul du moment statique de charge maximale (Mmax) :
Veuillez confirmer Mmax ≤ Mc (voir les symboles de formule dans le tableau 1-2).
Tableau 1-1 Explication des symboles de formule :
- Frmax : Charge radiale maximale (N ou kgf) – Se référer au diagramme de charge externe.
- Famax : Charge axiale maximale (N ou kgf) – Se référer au diagramme de charge externe.
- Lr, La : __ (unité non précisée, éventuellement mètres) – Se référer au diagramme de charge externe.
- R : Décalage (m) – Se référer au diagramme de charge externe dans le tableau des spécifications de chaque série.
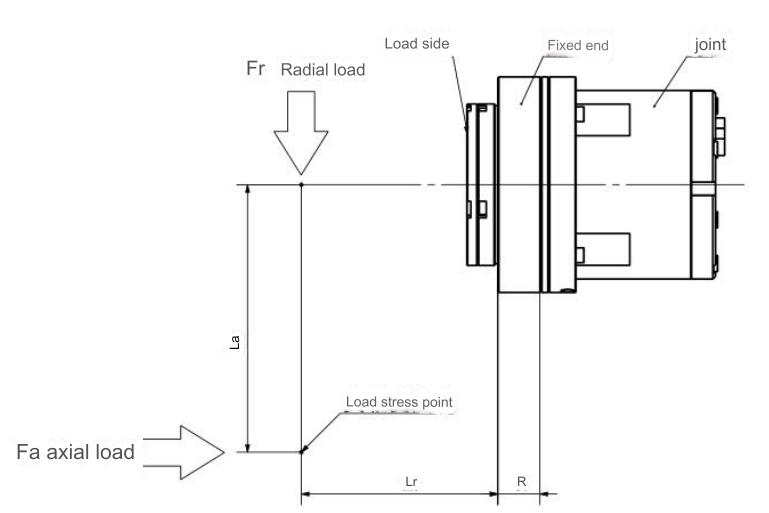
Tableau 1-2 Valeurs de couple admissibles pour chaque type de joint :
| Type de joint | Décalage (R) | Charge de couple admissible (Mc) |
|---|---|---|
| eRob70 | 0,0217m | 74 Nm / 7,6 Kgfm |
| eRob80 | 0,0239m | 124 Nm / 12,6 kgfm |
| eRob90 | 0,0255m | 187 Nm / 19,1 Kgfm |
| eRob110 | 0,0296m | 258 Nm / 26,3 Kgfm |
| eRob142 | 0,0364m | 580 Nm / 59,1 Kgfm |
| eRob170 | 0,044m | 849 Nm / 86,6 Kgfm |
Exemple: Compte tenu de la sélection du joint eRob70H avec La = 0,2 m, Lr = 0,5 m, Frmax = 50N et Famax = 30N.
D'après le tableau 1-2, R = 0,0217 m, Mc = 74 Nm.
Remplacez dans la formule :
Depuis , il satisfait aux exigences de couple de flexion.
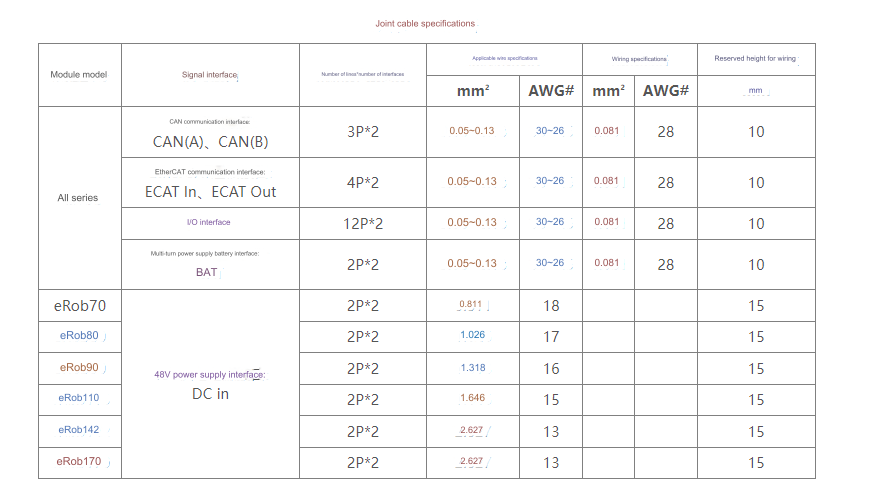
19. Quelles sont les spécifications des câbles et les hauteurs de réserve de câblage pour les modules d'articulation du robot eRob ?

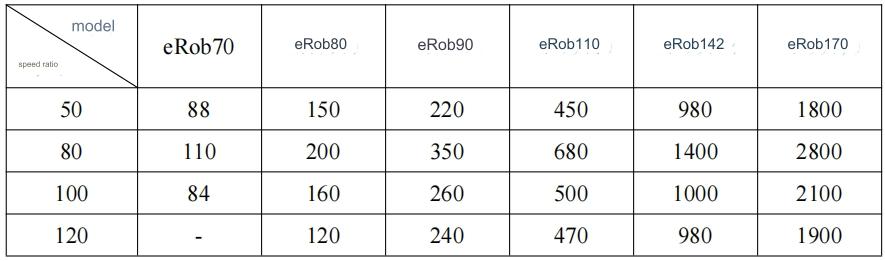
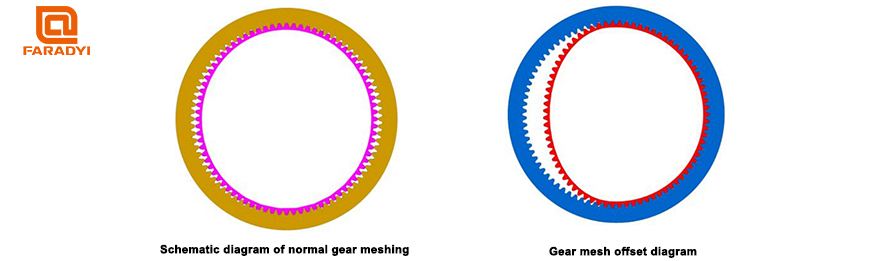
20. Qu'est-ce que le phénomène de cogging ?
Dans un module d'articulation de robot, lorsqu'il est soumis à un couple d'impact excessif pendant le fonctionnement, l'engagement entre la roue rigide et les engrenages de la roue flexible peut momentanément se déplacer, même si les composants tels que la cannelure flexible de la boîte de vitesses restent intacts. Ce phénomène est appelé « réaction négative ». Le couple lors de cet événement est appelé couple de jeu (voir les valeurs dans le tableau ci-dessous). Si le phénomène de jeu persiste pendant le fonctionnement, les particules d'usure générées par le jeu peuvent entraîner une usure précoce des engrenages, réduisant ainsi la durée de vie des roulements d'entraînement harmonique.
Il est crucial de résoudre et d'atténuer rapidement les problèmes de jeu pour éviter un fonctionnement prolongé dans de telles conditions, minimisant ainsi l'impact sur la longévité des engrenages et les performances des roulements d'entraînement harmonique.
L'engrènement normal des engrenages est illustré dans le diagramme en bas à gauche. Lorsqu'un chien est engagé, les engrenages peuvent s'engrener anormalement, comme illustré dans le diagramme en bas à droite, avec un décalage unilatéral. La poursuite du fonctionnement dans cet état peut entraîner des vibrations, entraînant des dommages à l'engrenage flexible.
21. Comment connecter des modules communs à l'aide de TwinCAT ?
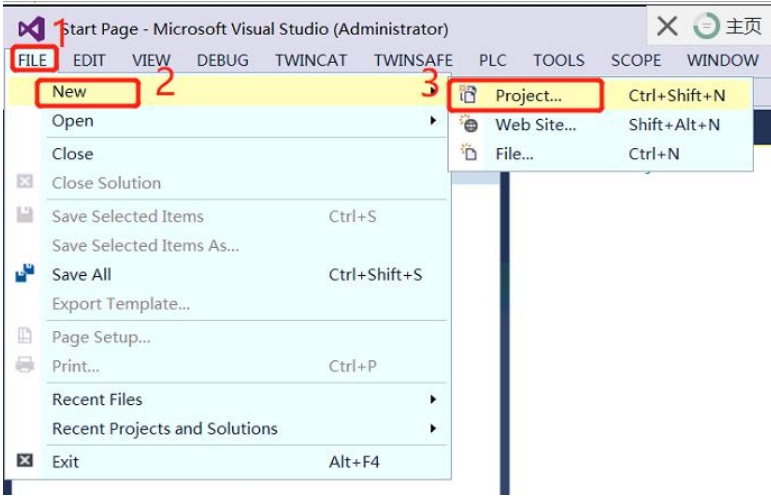
1. Comme le montre la figure 1, ouvrez la barre de menu Fichier->Nouveau->Projet et créez un nouveau projet TwinCAT.
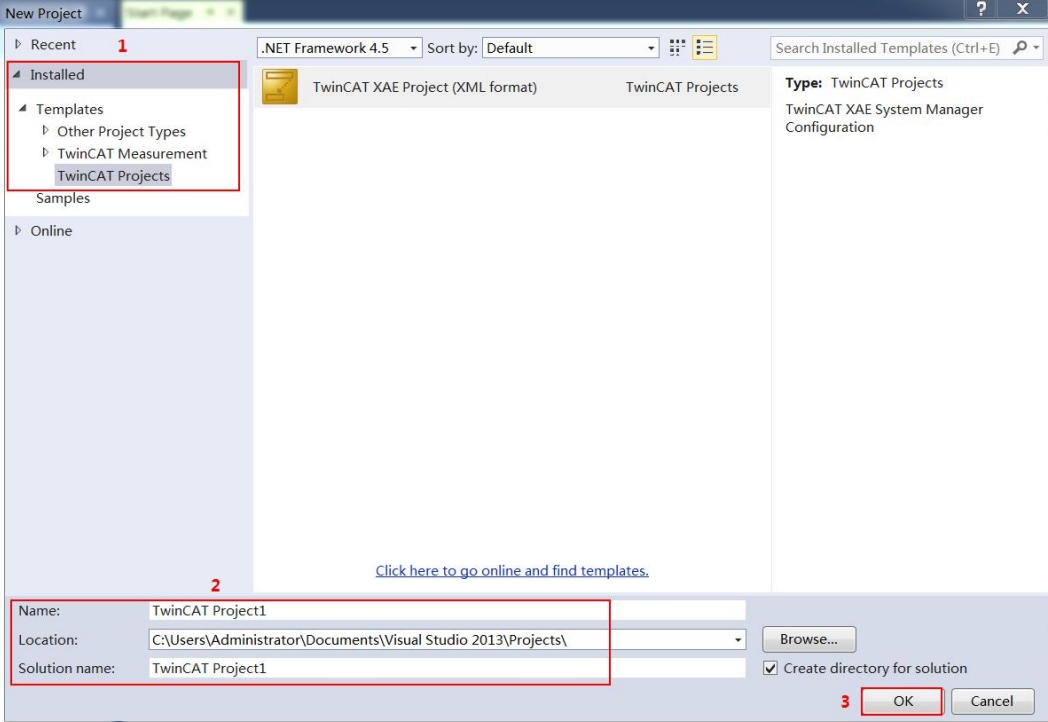
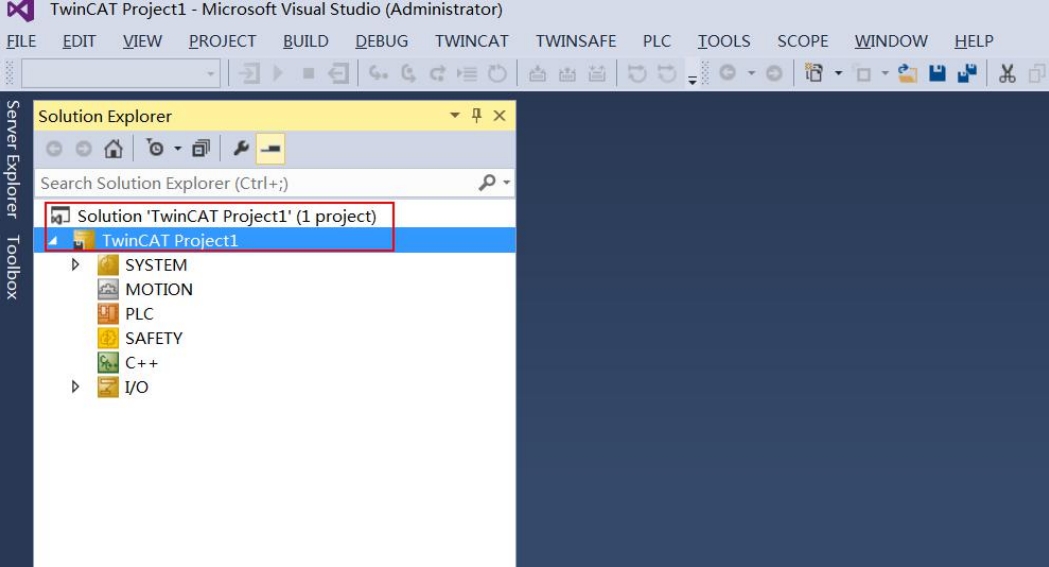
2. La fenêtre Nouveau projet apparaît (comme le montre la figure 2), sélectionnez Installé->Modèles->Projets TwinCAT sur la droite, nommez le projet en anglais (Nom), sélectionnez le chemin de stockage du projet (Emplacement) et cliquez sur le bouton « OK ». » pour créer un nouveau Un projet nommé « TwinCAT Project1 » a été créé (Figure 3).
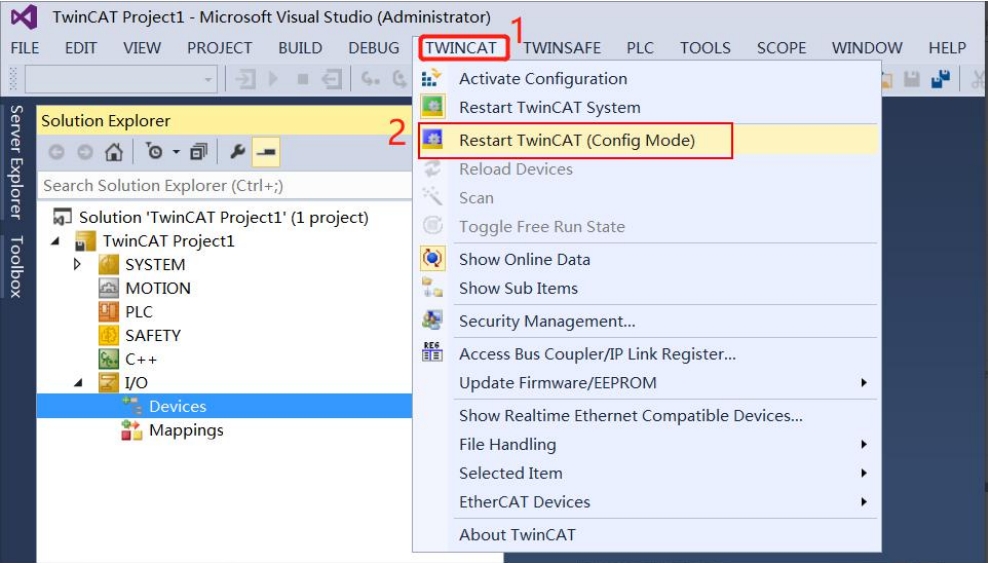
3. Comme le montre la figure 4, cliquez sur TwinCAT->Redémarrer TwinCAT (mode configuration) dans la barre de menu. La fenêtre Microsoft Viusal Studio apparaîtra (Figure 5) et cliquez sur le bouton « OK ».

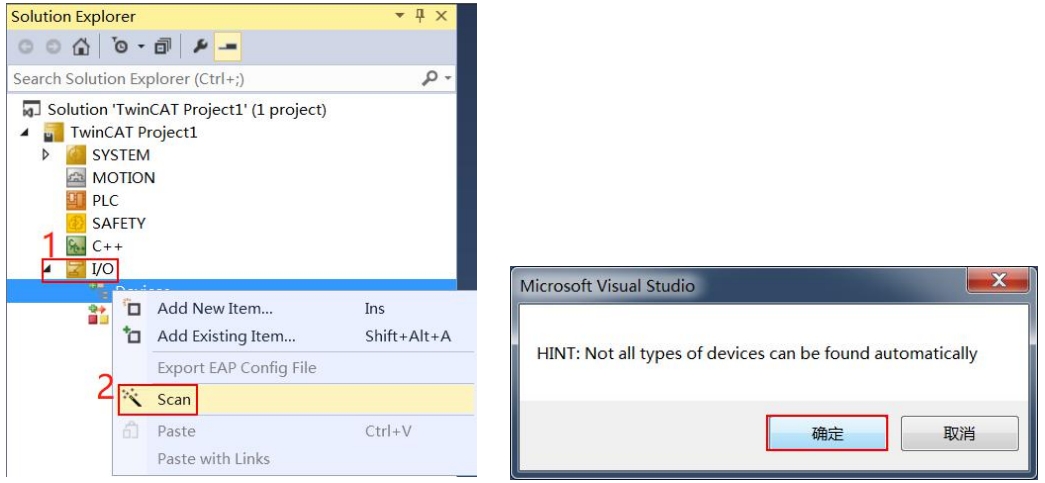
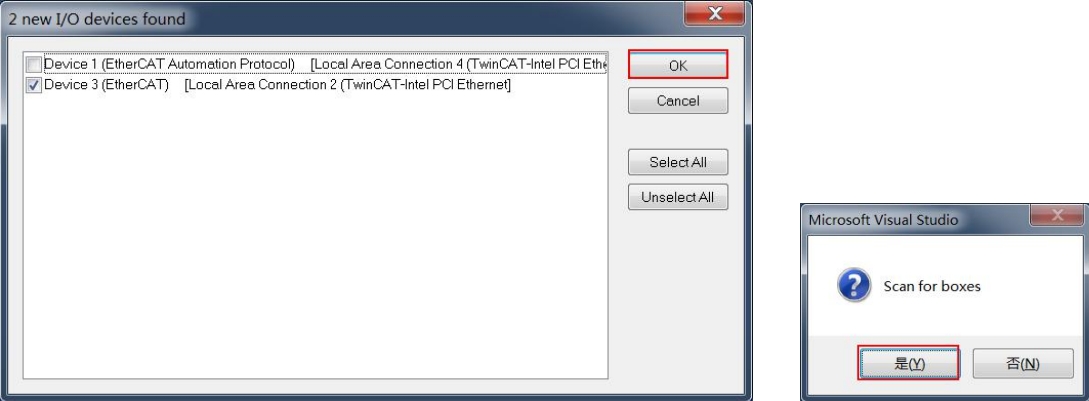
4. Comme le montre la figure 6, sélectionnez E/S dans le répertoire du projet, cliquez avec le bouton droit sur Périphériques-> Analyser, la fenêtre Microsoft Viusal Studio apparaîtra (comme le montre la figure 7) et cliquez sur le bouton « OK ». La fenêtre « Nouveaux périphériques d'E/S trouvés » apparaît (comme le montre la figure 8) et le périphérique automatiquement sélectionné est le périphérique esclave analysé (si le périphérique sélectionné automatiquement n'est pas affiché, cela signifie que le périphérique esclave n'a pas été analysé. , et l'état de fonctionnement de l'appareil doit être confirmé et la connexion du câble réseau est normale), cliquez sur le bouton « OK ». Cliquez simplement sur le bouton « OK » ou « Oui » dans les fenêtres contextuelles suivantes (Figure 9 ~ Figure 11).

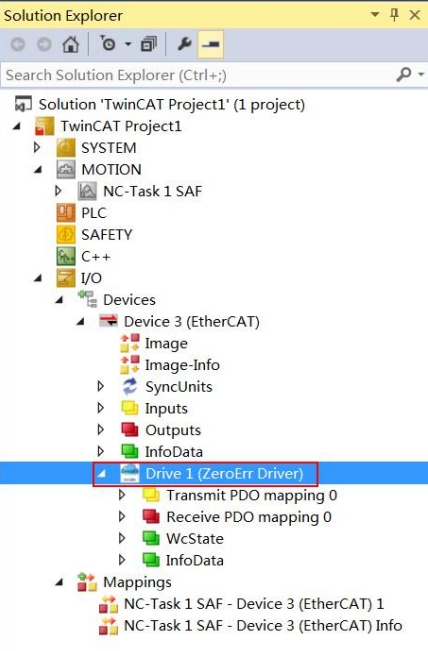
5. À ce stade, comme le montre la figure 12, l'icône du logo ZeroErr Driver et le nom du périphérique esclave Drive1 (Zerror Driver) apparaissent sous le chemin IO/Devices du projet « TwinCAT Project1 », indiquant que la station maître a réussi à scanner et à connecter le servomoteur, sinon le servomoteur doit être confirmé. Si le fichier XML correspondant et son chemin de placement sont corrects.
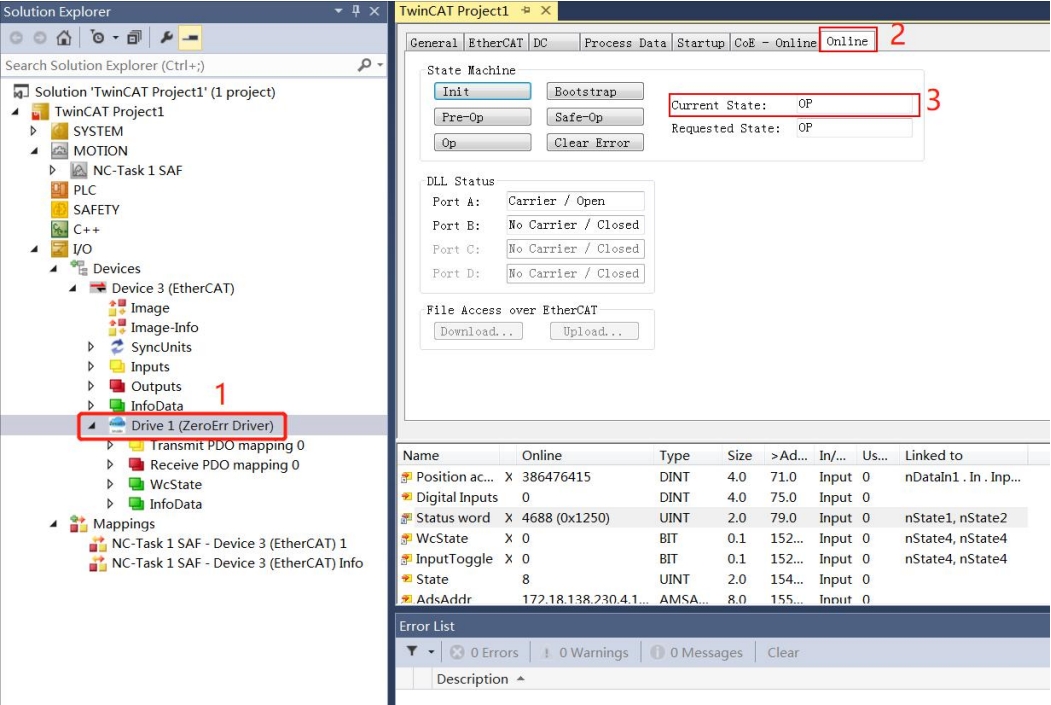
6. Comme le montre la figure 13, cliquez sur le nom du périphérique Drive1 (Zerror Driver), cliquez sur « En ligne » pour afficher l'état de la machine d'état d'EtherCAT. Si l'état actuel affiche « OP », cela signifie que le pilote passe normalement en mode OP.
1. Qu'est-ce qu'un encodeur magnétique ?
Le principe d'un codeur magnétique est similaire à celui d'un codeur optique, mais il utilise des signaux de champ magnétique. À l’intérieur de l’encodeur magnétique se trouvent un disque magnétique et un capteur magnétorésistif. La rotation du disque magnétique provoque une modification de l'intensité du champ magnétique interne, qui est détectée par le capteur magnétorésistif. Le signal est ensuite traité à travers le circuit pour générer le signal de sortie. La résolution du codeur magnétique est déterminée par le nombre de pôles magnétiques sur le disque magnétique, la quantité de capteurs magnétorésistifs et la méthode de traitement du signal. L’un des avantages de l’utilisation des principes du champ magnétique pour la génération de signaux est que les signaux magnétiques ne sont pas affectés par la poussière, l’humidité, les températures élevées ou les vibrations.

Par rapport aux codeurs optiques et à réseau traditionnels, les codeurs magnétiques présentent des caractéristiques supérieures telles que la résistance aux vibrations, la résistance à la corrosion, la résistance à la pollution, la résistance aux interférences et une large plage de températures. Ils peuvent être appliqués dans des domaines où les codeurs optiques traditionnels peuvent ne pas convenir. La série d'encodeurs Faradyi Motors reste applicable dans les environnements difficiles tels que les zones contaminées par l'huile, les environnements à fortes vibrations, l'humidité élevée et les conditions de température extrêmes. Les codeurs magnétiques sont spécialement conçus pour les environnements extrêmes et difficiles qui exigent des caractéristiques de température étendues, une résistance aux vibrations et aux impacts intenses et des niveaux de protection élevés.
De plus, nos codeurs magnétiques disposent de circuits de sortie de signal fiables, de méthodes d'installation simples et peuvent réduire considérablement les pertes dues aux temps d'arrêt. Généralement utilisés dans les machines de métallurgie, de fabrication du papier et de travail du bois, les codeurs magnétiques hautes performances trouvent de nombreuses applications dans le contrôle industriel, la fabrication mécanique, les navires, les textiles, l'impression, les radars, les communications et d'autres domaines.
Faradyi Motors conçoit et produit indépendamment des codeurs magnétiques. Nos codeurs magnétiques sont connus pour leur structure simple et compacte, l'absence de points de contact, leur longue durée de vie, leur résistance aux températures élevées et basses, leur résistance aux vibrations, leur vitesse de réponse rapide et leur résilience aux effets de la poussière et de la condensation. Ils sont largement utilisés par les clients dans des domaines tels que la robotique, les lignes de production automatisées, les machines d'assemblage, les ascenseurs, les machines textiles, les machines à coudre, les machines d'emballage et d'impression, les machines-outils CNC, les traceurs, les instruments de mesure d'angle, etc.
2. Avantages des codeurs rotatifs multitours ?
3. Différences entre les codeurs incrémentaux et absolus ?
Un encodeur fait référence à un appareil qui code des signaux ou des données, les convertissant en signaux pouvant être utilisés pour la communication, la transmission et le stockage. Il peut être classé en deux types principaux : les codeurs incrémentaux et absolus, avec de larges applications dans notre production et notre vie quotidienne.
Classification des encodeurs :
-
Codeur incrémental: Les codeurs incrémentaux utilisent le principe de conversion photoélectrique pour produire trois ensembles d'impulsions carrées : phases A, B et Z. Les phases d'impulsion A et B ont une différence de phase de 90 degrés, ce qui permet de déterminer facilement le sens de rotation. La phase Z fournit une impulsion pour chaque tour complet, servant de point de référence pour le positionnement. Ses avantages incluent un principe de construction simple, une durée de vie mécanique dépassant des dizaines de milliers d'heures, une forte capacité anti-interférence, une fiabilité élevée et une aptitude à la transmission longue distance. Cependant, il ne peut pas fournir les informations de position absolue de la rotation de l'arbre.
-
Codeur absolu : Les codeurs absolus génèrent directement des signaux numériques. Que ce soit dans des environnements industriels ou dans des applications extérieures difficiles, il est crucial d’améliorer l’efficacité, la fiabilité et la durabilité. Par conséquent, les composants du codeur doivent répondre à diverses exigences tout en garantissant une durabilité maximale et une rentabilité plus élevée. Les codeurs magnétiques multitours absolus de la série eCoder introduits par ZeroDifference Cloud Control ont passé avec succès les tests dans les conditions environnementales les plus difficiles au monde. Ces codeurs allient une robustesse fiable, une ultra-haute précision et une technologie de communication avancée, ouvrant ainsi une large gamme de domaines d'application très attractifs.
-
Codeur absolu hybride : Le codeur absolu hybride produit deux ensembles d'informations : un ensemble pour détecter les positions des pôles magnétiques avec une fonctionnalité d'informations absolues, et l'autre ensemble identique aux informations de sortie des codeurs incrémentaux.
4. Qu'est-ce qu'un encodeur creux ?
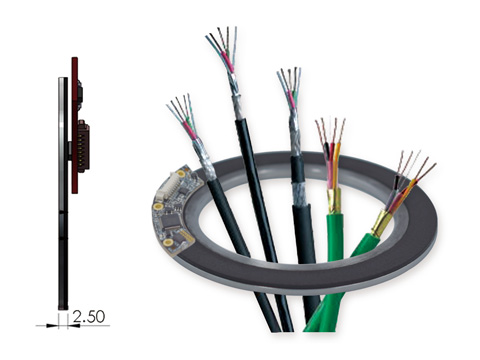
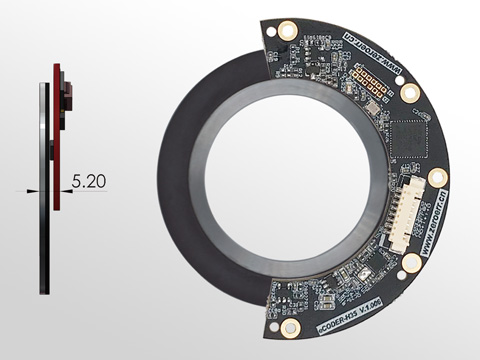
Les encodeurs creux Faradyi disposent d'un trou central de diamètre maximum allant jusqu'à 83 mm, leur permettant de passer facilement à travers les structures mécaniques, les câbles, les systèmes pneumatiques, etc.
Codeurs creux Faradyi
De conception ultra fine et de fixation ou de verrouillage par plaques à ressort, ces codeurs ne nécessitent aucun accessoire supplémentaire lors de l'installation. Ils assurent également l'absorption des chocs, assurant la coaxialité. Largement utilisés dans les applications exigeant une haute précision et des espaces compacts, ils sont particulièrement adaptés aux moteurs à courant continu à entraînement direct.
Les moyeux de support de précision personnalisables facilitent une installation rapide et précise.
Lorsqu'ils sont combinés avec les variateurs intégrés miniatures Faradyi Motors, ils permettent un asservissement compact.
Les applications incluent les équipements médicaux, les articulations de robots, l'automatisation générale et les machines-outils à moteur DD, entre autres domaines.
5. Utilisation de l'encodeur : Comment calculer l'angle de rotation ?
6. Comment lire la valeur de sortie de position complète de l'encodeur ?
7. Causes des dommages au disque codeur ?
8. Comment installer un disque encodeur de type divisé ?
9. Que faut-il prendre en compte lors du stockage et de l'utilisation des encodeurs eCoder ?
Précautions pour l'utilisation de l'encodeur :
-
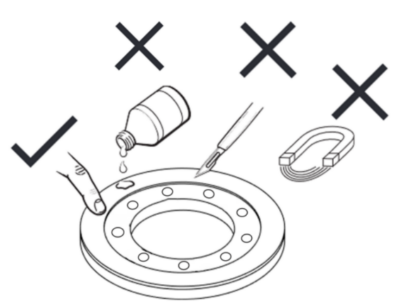
Tenir à l'écart des matériaux magnétiques :
- Évitez de rapprocher la partie magnétique du disque codeur de matériaux soumis à un champ magnétique pour éviter d'endommager les pistes magnétiques du disque codeur.
-
Évitez l'exposition aux champs magnétiques :
- N'exposez pas la partie magnétique du disque codeur à un champ magnétique d'une intensité de surface supérieure à 20 mT, car cela pourrait entraîner des dommages permanents au disque codeur.
-
Évitez les impacts sur l'anneau magnétique :
- Lors de l'installation ou du stockage du disque codeur, veillez à ne pas heurter la surface où se trouve l'anneau magnétique. Assurez-vous que l'anneau magnétique n'est pas rayé. N'utilisez pas de liquides corrosifs pour nettoyer le disque de l'encodeur. S'il y a des débris à la surface, retirez-les délicatement à l'aide d'un ruban de papier sans trace.
-
Protégez la tête de lecture :
- Prendre des précautions pour protéger la tête de lecture afin d'éviter tout risque de chute de limaille de fer directement dessus, car cela pourrait endommager les composants.
-
Sensibilisation à l'électricité statique :
- La tête de lecture est sensible à l'électricité statique. Sans protection électrostatique appropriée ou dans un environnement non contrôlé, ne touchez pas les circuits électroniques, les fils ou les zones des capteurs directement avec les mains.
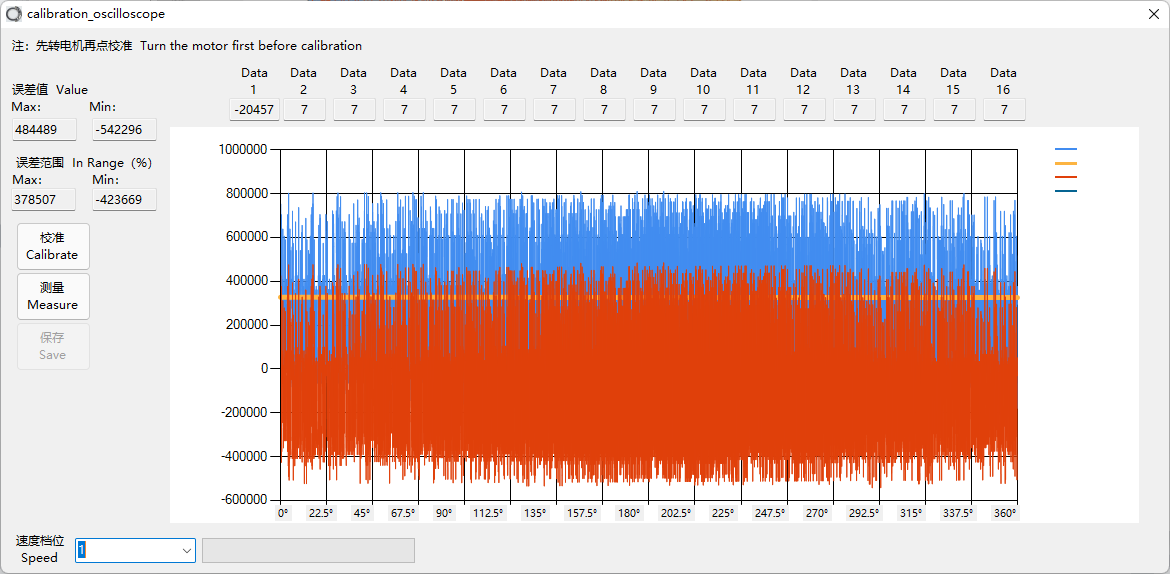
10. Quels sont les échecs d'étalonnage courants des encodeurs eCoder ?
Échec de l'étalonnage : scénarios courants
- L'erreur globale dépasse la tolérance :
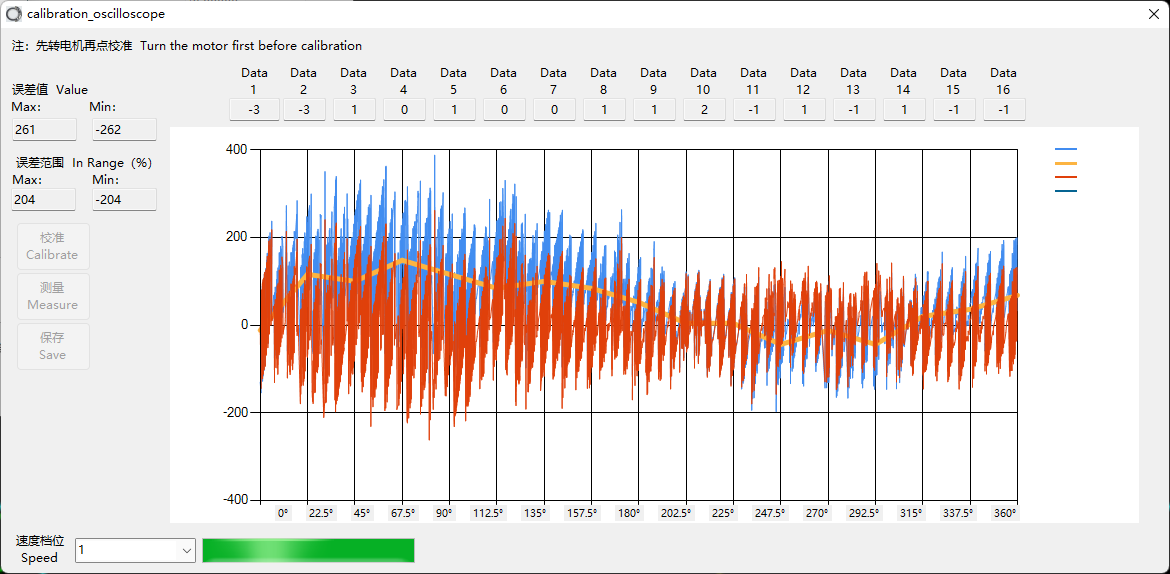
Généralement, cette forme d’onde se produit en raison de l’installation structurelle. Vérifiez ou réajustez la distance d'installation entre la tête de lecture et le disque de code. Se référer aux instructions d'installation mécanique.
2. Causes possibles des pics de forme d'onde :
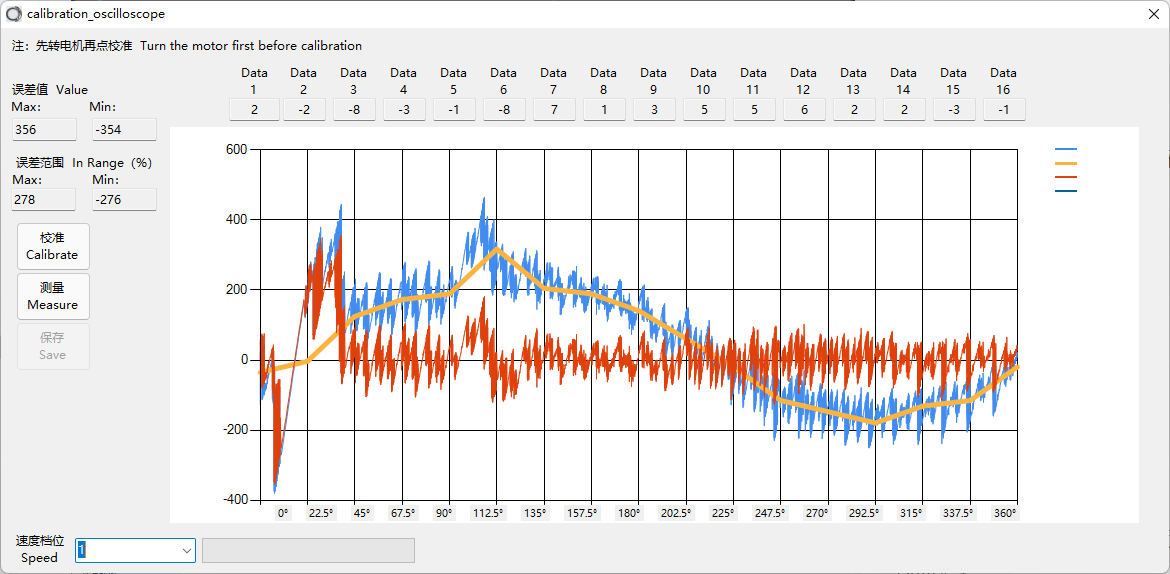
3. Causes possibles des formes d'onde anormales :