
Transitioning from Hollywood’s depiction of automated machines, from characters like Bruce Dern in Silent Running, Arnold Schwarzenegger in the Terminator series, and Will Smith in I Robot
We now witness the emergence of real-world machines poised to revolutionize various industries. Unlike their fictional counterparts, these machines are designed to serve practical purposes and augment human capabilities rather than subjugate us. With an increasing influx of intelligent mobile machines in the market, specifically engineered to assist or even replace humans in a wide array of tasks.
It is no surprise that Oxford University researchers predict that around 47 percent of U.S. jobs could become automated within the next two decades. To aid engineers in the selection of suitable drives to power their automated vehicles, we have compiled the following comprehensive guide.
Automated Vehicles: Simplifying Life
The convergence of advanced technologies, including enhanced batteries, efficient motors, GPS, RFID, laser guidance systems, and powerful microcontrollers, has paved the way for the development of increasingly capable automated vehicles.
While fixed robots in manufacturing have been around for some time, what sets apart the latest advancements is the availability of smaller, cost-effective mobile robotic vehicles and assistive machines. These innovations are designed to handle the mundane, repetitive, costly, and hazardous tasks traditionally performed by humans. Some examples include:
- Cleaning
- Lifting
- Stacking
- Carting
- Transporting
- Bomb disposal
In scenarios such as warehouse operations, the implementation of robots can yield remarkable improvements in productivity, surpassing 800 percent. This significant enhancement can be attributed to the robots’ ability to move swiftly without experiencing fatigue, coupled with the elimination of human errors through automated systems.
Electric Motors: Powering Automated Vehicles
When it comes to electrically powered vehicles, their ability to move hinges on the utilization of an electric motor, typically connected to one or more drive wheels or treads through a gear train. These vehicles primarily rely on batteries as their power source, and some possess the intelligence to autonomously seek out charging stations when needed.
The market for such vehicles is steadily expanding, with the global mobile robotics sector projected to grow by 12.6 percent by 2019. This growth can be attributed to a combination of technological advancements and the growing preference for environmentally conscious and efficient practices adopted by industry management teams.
There are various terms used to describe these vehicles, including:
- AGVs (Automated Guided Vehicles)
- AGCs (Automated Guided Carts)
- Unit load vehicles
- Electric carts
- Tuggers
- Pushers
Regardless of the nomenclature used, these vehicles share common characteristics: mobility, intelligence (in many cases), semi- or full-autonomy, and often electric propulsion.
Understanding Vehicle Loads and Drive Systems
The market for vehicles designed to handle loads up to 10,000 lbs. (4,500 kg) currently exceeds $750 million. However, when we narrow down the market by load capacity, previous studies have segregated unit load vehicles at 10,000 lbs. (4,500 kg) and under, leaving the heavier loads to fork truck manufacturers.
In this discussion, we focus on vehicles specifically designed to handle loads up to 10,000 lbs. (4,500 kg). These machines vary in complexity, ranging from simple material handling robots that can cost less than $1,000 to fully automated AGVs with programmable capabilities that may exceed $50,000. However, even within this load range, considering the diverse workloads that are typically managed by one or a few humans, a range of 100 lbs. (45 kg) to 10,000 lbs. (4,500 kg) is too broad.
Tasks such as construction site material movement, stockroom product handling, hospital patient transportation and handling, meal/linen/medication delivery, and moving heavy diagnostic equipment generally fall within the load capacity of vehicles rated up to approximately 2,000 lbs. (900 kg).
In this load class, we will explore electrically powered vehicles and specifically examine the propulsion systems utilized in them, including fully integrated traction drive systems.
Choosing the Appropriate Design for Electric Vehicle Propulsion
When it comes to electric vehicle propulsion design, there are two primary approaches to consider.
In-wheel Designs
In-wheel propulsion drives were initially introduced over a century ago for automobiles. Recent technological advancements have made these drives a feasible option for applications requiring a compact and silent solution. This design involves placing an electric motor within the wheel rim of a vehicle.
The motor’s rotating component is directly integrated into the rim, delivering torque directly to the wheel. Since there is no mechanical advantage from gearing, these motors need to generate higher torque levels at relatively lower speeds. Without proper design, the efficiency of direct-drive, in-wheel solutions may be suboptimal within the typical operating range.
In-wheel designs commonly utilize torque motors due to their advantages. They have fewer components compared to other solutions as they eliminate the need for gear trains, consequently minimizing gear power loss.
The benefits of in-wheel designs include:

- Realizing efficiencies of over 80%, which is crucial for battery-powered vehicles.
- Allowing for more compact and space-saving designs compared to alternative approaches.
- Delivering the best solution for low audible noise due to the direct-drive design.
However, direct-drive, in-wheel solutions still face challenges. The high torque motors required are generally more expensive than traditional electric motors and may even surpass the cost of a motor and drivetrain combination that delivers the same performance. Additionally, since the in-wheel motor is exposed to the same environment as the wheel itself, adequate protection measures must be taken during the engineering process.
Off-Wheel Designs
Off-wheel designs, which involve one or more electric motors transmitting power to the drive wheels through a drivetrain, are currently more prevalent than in-wheel designs. Commonly used drivetrains include belt and pulley systems, chain and sprocket mechanisms, as well as various types of gearboxes. Some designs even incorporate a combination of these transmission methods.
The drivetrain’s mechanical advantage reduces the required torque from the motor while increasing its speed proportionately. This allows for the utilization of a more cost-effective electric motor, although the savings may be offset by the expenses associated with the drivetrain when comparing geared off-wheel solutions to direct-drive in-wheel alternatives.
Off-wheel designs offer several advantages over in-wheel designs:
- More flexibility in package size and configuration due to the absence of space constraints imposed by in-wheel designs.
- The possibility of using smaller diameter wheels, as opposed to direct-drive motors that typically dictate wheel size based on their dimensions.
- Ease of incorporating accessories like encoders, holding brakes, and integrated electronic drives into off-wheel motors.
- Protection for the motor, electronics, and drivetrain from harsh environments provided by the vehicle frame.
However, off-wheel designs have certain drawbacks when compared to in-wheel designs:
- Lower efficiency compared to in-wheel designs.
- Reduced reliability and increased audible noise due to the added complexity of gearing in contrast to in-wheel solutions.
How to size a wheel drive for applications

Figure 1 displays the required torque and power for an eight-inch WheelMax operating on a typical flat surface across various loads. Several considerations need to be taken into account when sizing a wheel drive for an application:
- Total Weight and Number of Drive Wheels: Determine the total weight of the loaded vehicle and the number of drive wheels it will have. The load handled by each wheel drive is approximately the total weight divided by the number of drive wheels. If there are additional unpowered casters, each wheel drive must handle less normal load but will still experience the same inertial mass during acceleration.
- Acceleration Torque: The wheel’s delivered torque for acceleration may need to be several times higher than the torque required to maintain speed or climb ramps. Keep in mind that the rated performance of a wheel drive depends on other operating conditions, such as incline angles that need to be navigated.
- Wheel Diameter: The wheel drive’s diameter influences the required torque level and speed to achieve the desired vehicle performance. Larger wheel diameters might be necessary to meet ground clearance and speed requirements, and they can provide smoother travel on rough surfaces. However, they also require more motor torque.
- Motor Speed and Power: Larger diameter wheels require less motor speed and power. For example, in Figure 1, the torque and power requirements for an eight-inch wheel drive on a flat surface are depicted for various loads.
The Faradyi90HXXI: The Best of your option
Faradyi Motors has introduced the Faradyi90HXXI, a new powered electric wheel drive that combines the advantages of an in-wheel, direct-drive design while actually being an off-wheel design. The initial available models are the Faradyi90I 2D and Faradyi90I 3D.
These wheel drives incorporate an Faradyi brushless DC motor connected to the wheel through an efficient two-stage helical, epicyclic gearbox integrated into the wheel drive’s housing. The assembly includes a mounting bracket and a six- or eight-inch urethane tire.
The gear design and geometry in the Faradyi90HXXI have been optimized to reduce noise, vibration, and improve gear life. These units have undergone testing under elevated temperatures and high impact emergency stop conditions, exceeding expectations.
The integrated EnduraMax brushless motor in the Faradyi90HXXI includes an electronic drive to power the motor and control a holding brake if applicable. The brushless motor eliminates the need for regular brush replacements.

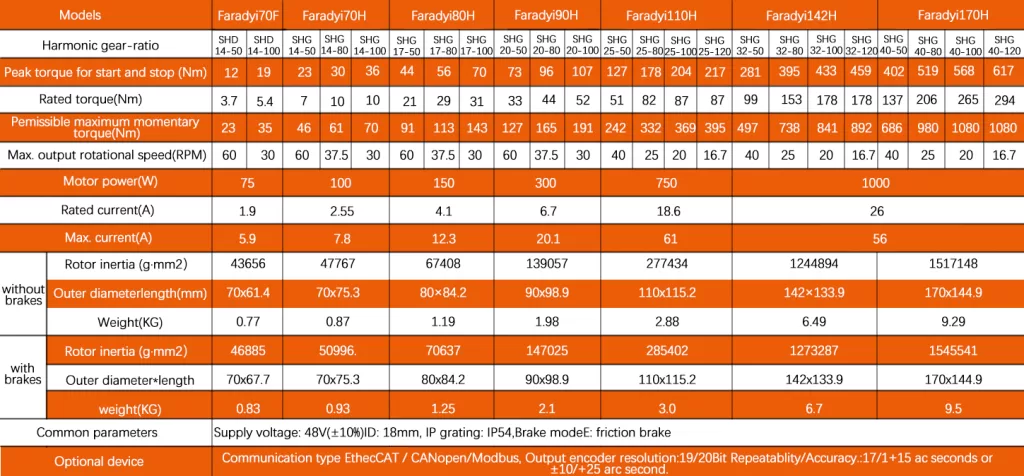
Table 1 provides an overview of the GWM line of wheel drives, including rated load capacity, tire diameter, rated wheel speed, winding voltage, rated output torque, and rated output power.
Choosing the Right Wheel Drive for Your Vehicle
To select the ideal wheel drive for your vehicle, a comprehensive analysis of its required performance is necessary, considering peak torque for acceleration and average power for typical travel routines. Additionally, consider the terrain the vehicle will encounter. Vehicles navigating steep inclines or running on surfaces with high rolling resistance, like carpet, will require a motor with greater torque capacity.
Due to the varying requirements of different vehicles, Faradyi Motors supports its customers in analyzing their specific applications to ensure all operating conditions are appropriately considered and met.
Have Any Question On Faradyi Motors, Contact Us or Email with Address: [email protected]




