
ブラシレスDCギアモーターのパワーを解き放つ
自動化の分野では、ブラシレスDCギアモーターの統合により、効率性と汎用性がシームレスに組み合わされ、産業に革命が起こりました。この記事では、ブラシレスDCギアモーターが減速を実現する仕組みについて詳しく説明します。

自動化の分野では、ブラシレスDCギアモーターの統合により、効率性と汎用性がシームレスに組み合わされ、産業に革命が起こりました。この記事では、ブラシレスDCギアモーターが減速を実現する仕組みについて詳しく説明します。

ステッピング モーターを駆動しているとき、モーターが静止状態のときにモーター内部からコイルの活動の急激な変化に似た大きなノイズが発生していることに気付いた場合、その原因はモーターが振動領域で動作していることであることが多いです。
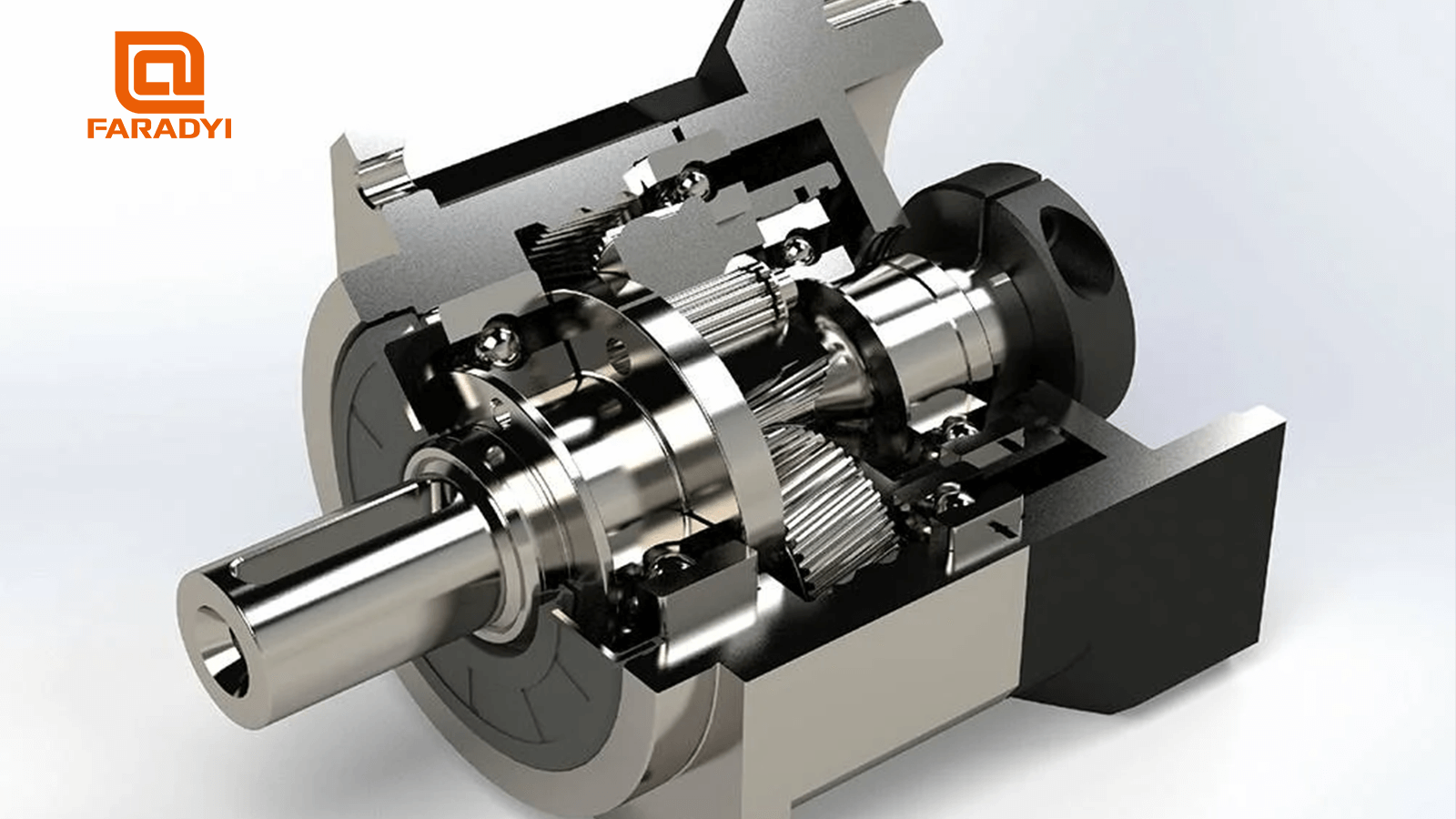
3 段遊星ギアボックスには内部に 3 セットの遊星ギアがあり、単段または 2 段ギアボックスと比較して、減速比、出力トルク、効率、精度が向上します。
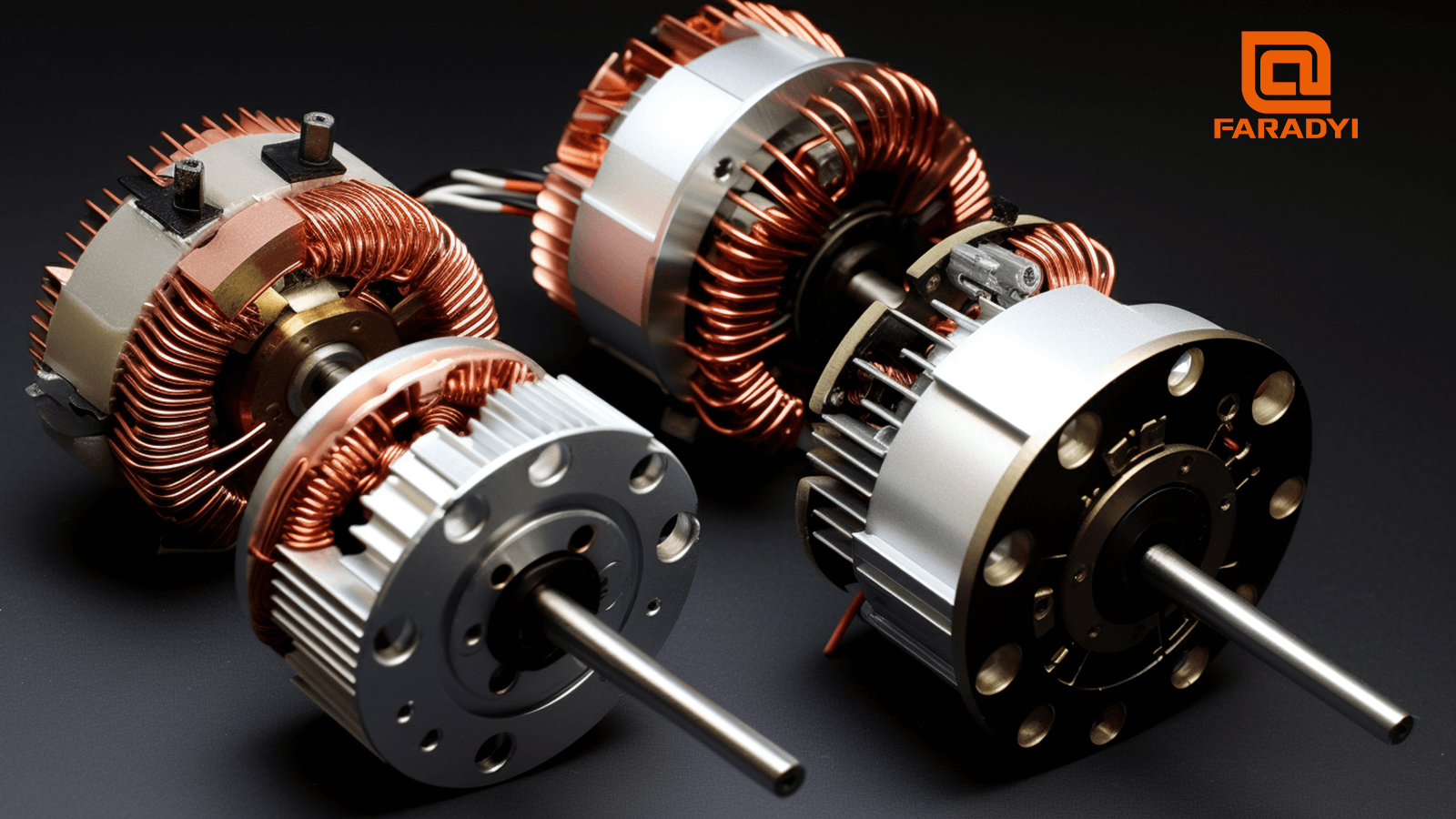
永久磁石ブラシレスモーターの動作中、最も重大なリスクは高温による減磁です。永久磁石ブラシレスモーターの重要な部品は磁性鋼であることは広く知られています。
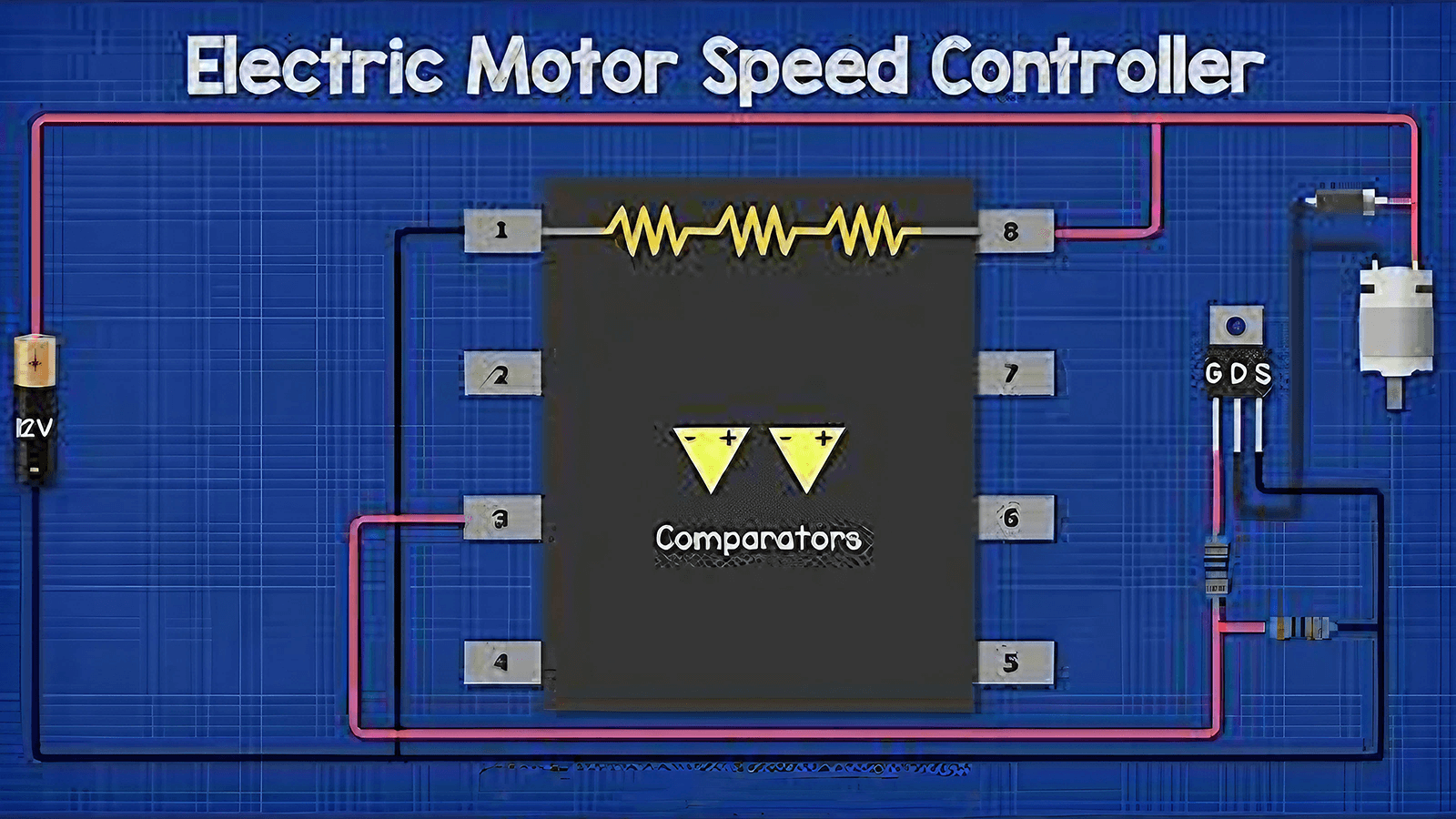
DC モーターは直流電力で動作する電気モーターです。DC モーターの速度を制御することは、多くのアプリケーションにおいて、要件に応じてモーターの速度を変え、機能を最適化するために不可欠です。速度制御により、車両、エレベーターなどのデバイス内のモーターの動きを制御できます。
永久磁石ブラシレスモーターの使用において、最も重大なリスクは高温による減磁です。永久磁石ブラシレスモーターの重要な部品は磁性鋼であり、磁性鋼は温度の影響を非常に受けやすいことはよく知られています。

この記事では、ブラシレスモーターの整流ノイズ周波数を計算するための公式について簡単に説明します。ブラシレスモーターは、3相巻線の電流の方向を表す1と0で示される6つの異なる状態で動作します。1は正、0は負です。正の電流は、

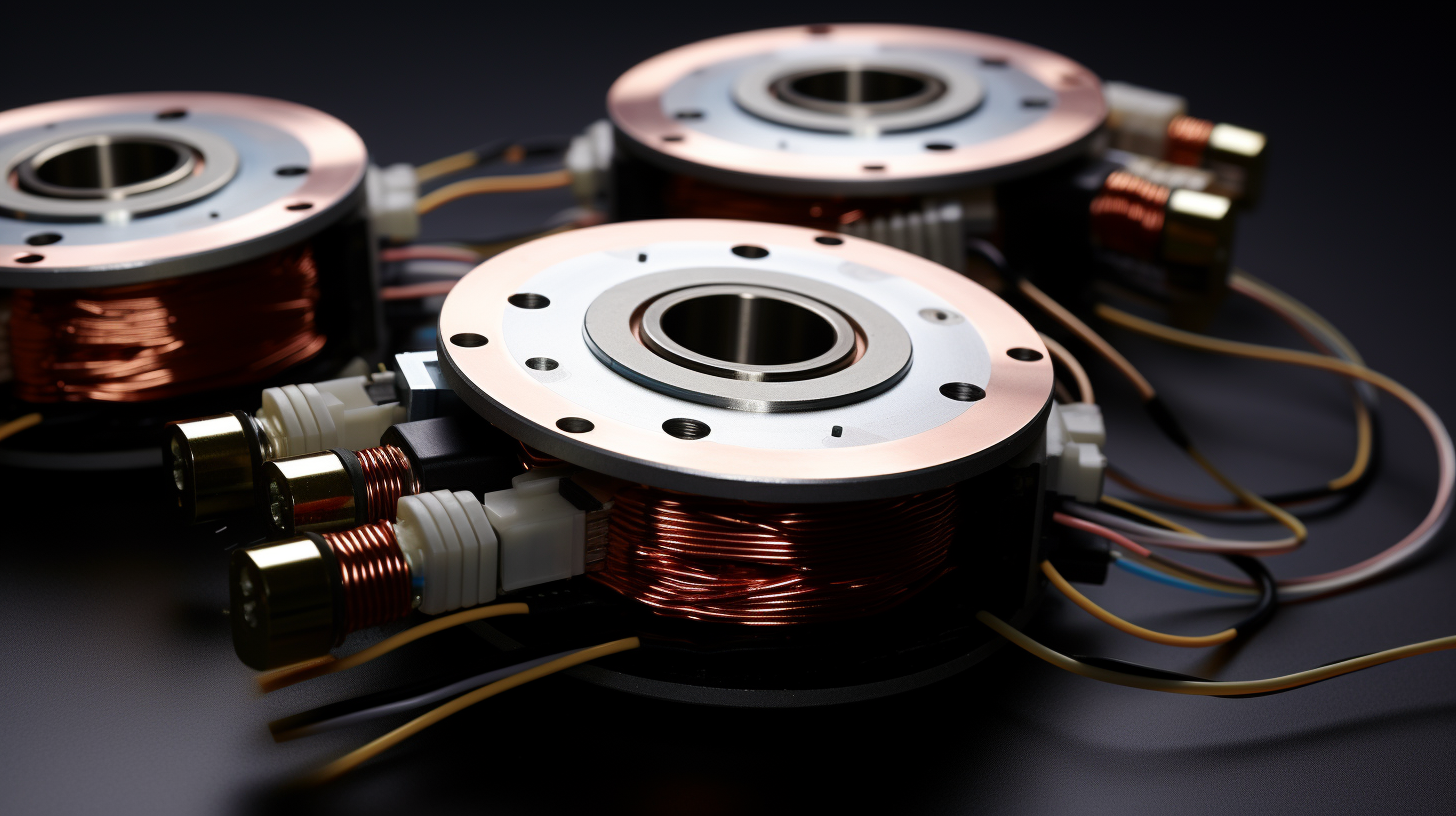
この記事では、ブラシレス モーター ベアリングについて包括的に紹介し、過熱の原因と効果的な解決策に焦点を当てます。
I. ベアリングの過熱を理解する
一般的に、ベアリングの過熱とは、転がりベアリングの場合は 95°C を超える温度、滑りベアリングの場合は 80°C を超える温度を指します。

起動時の電源電圧が低い、または電圧降下が大きすぎる:
電源電圧が低すぎる場合は、根本原因を調査してください。
起動時に過度の電圧降下が発生する場合は、起動電圧を上げることを検討してください。オートトランス起動装置を使用するシステムの場合、タップ位置を調整することで起動電圧を上げることができます。

2相4線式ステッピングモーターは、デジタルアクチュエータとして、モーションコントロールシステムで広く使用されています。多くのユーザーは、2相4線式ステッピングモーターを使用すると、かなりの発熱を経験することがあります。