- (+086) 18923470557
- 販売元
- 中国広東省東莞市大朗鎮仏福路53号7階、523770

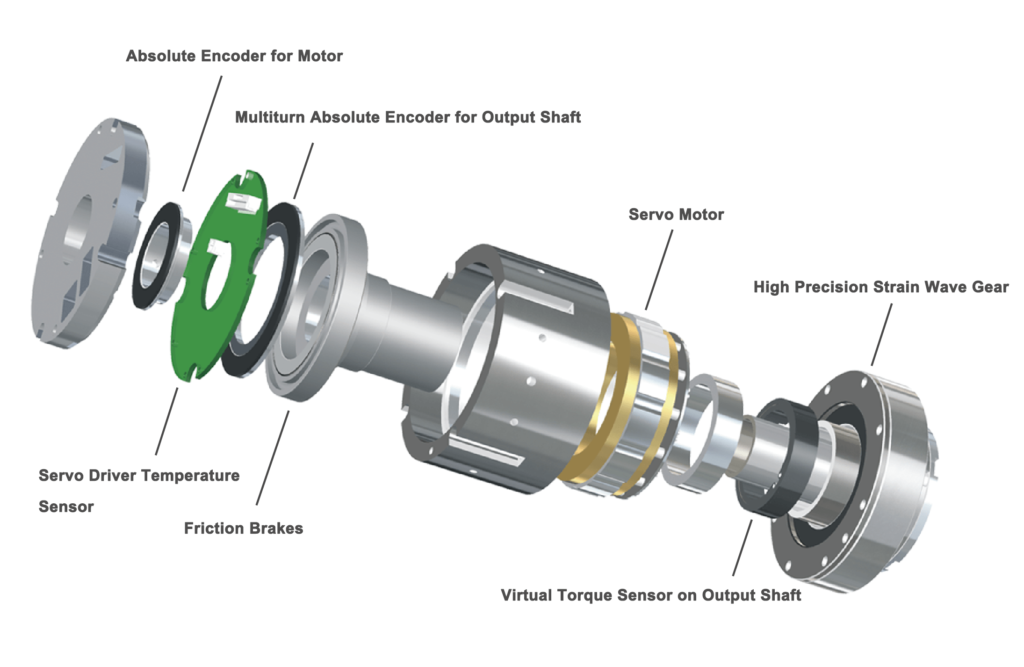
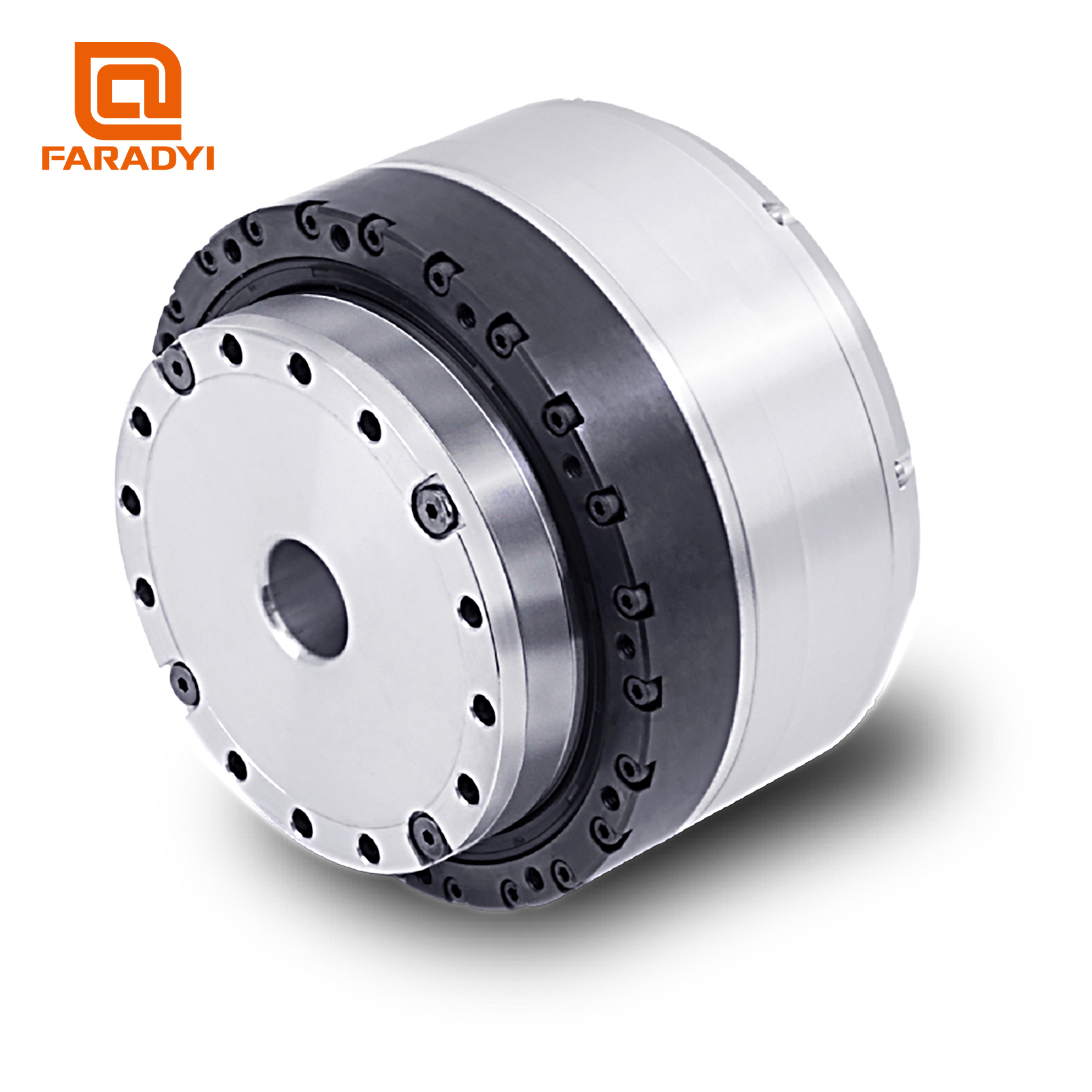
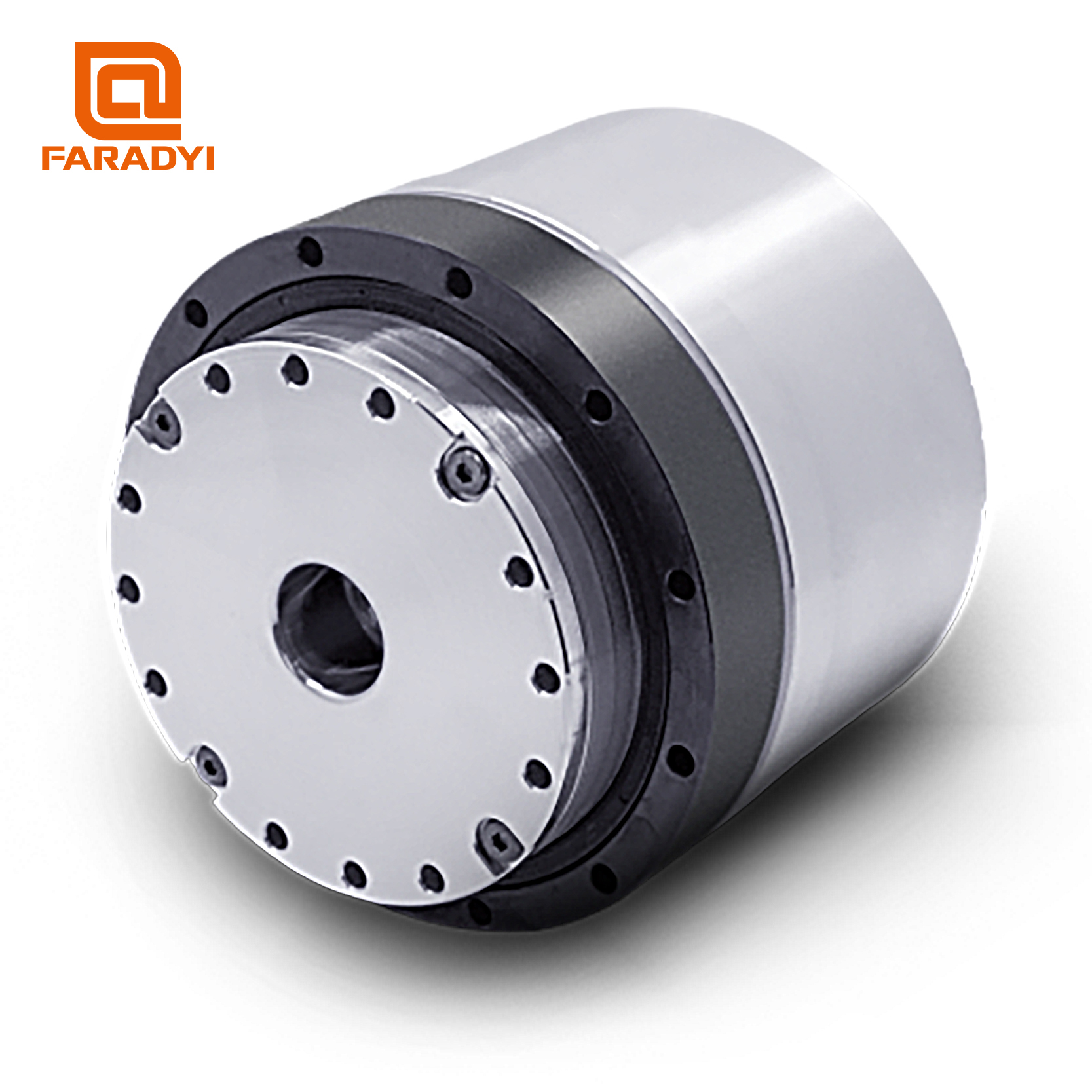
- ロータリーアクチュエータ

ファラディ70F

ファラディ70I

ファラディ80I

ファラディ90I
ファラディ110I
ファラディ142I

ファラディ170I

ファラディ70T

ファラディ80T

ファラディ90T

ファラディ110T

ファラディ142T