
ステッピングモーターの低速運転時の振動と騒音の解析と解決
ステッピング モーターは、低速で動作しているときにジッターやノイズが発生する場合があります。解決策としては、サブディビジョン ドライバーの使用、設置環境の調整、ステップ角度の変更、サーボ モーターの検討などがあります。

ステッピング モーターは、低速で動作しているときにジッターやノイズが発生する場合があります。解決策としては、サブディビジョン ドライバーの使用、設置環境の調整、ステップ角度の変更、サーボ モーターの検討などがあります。
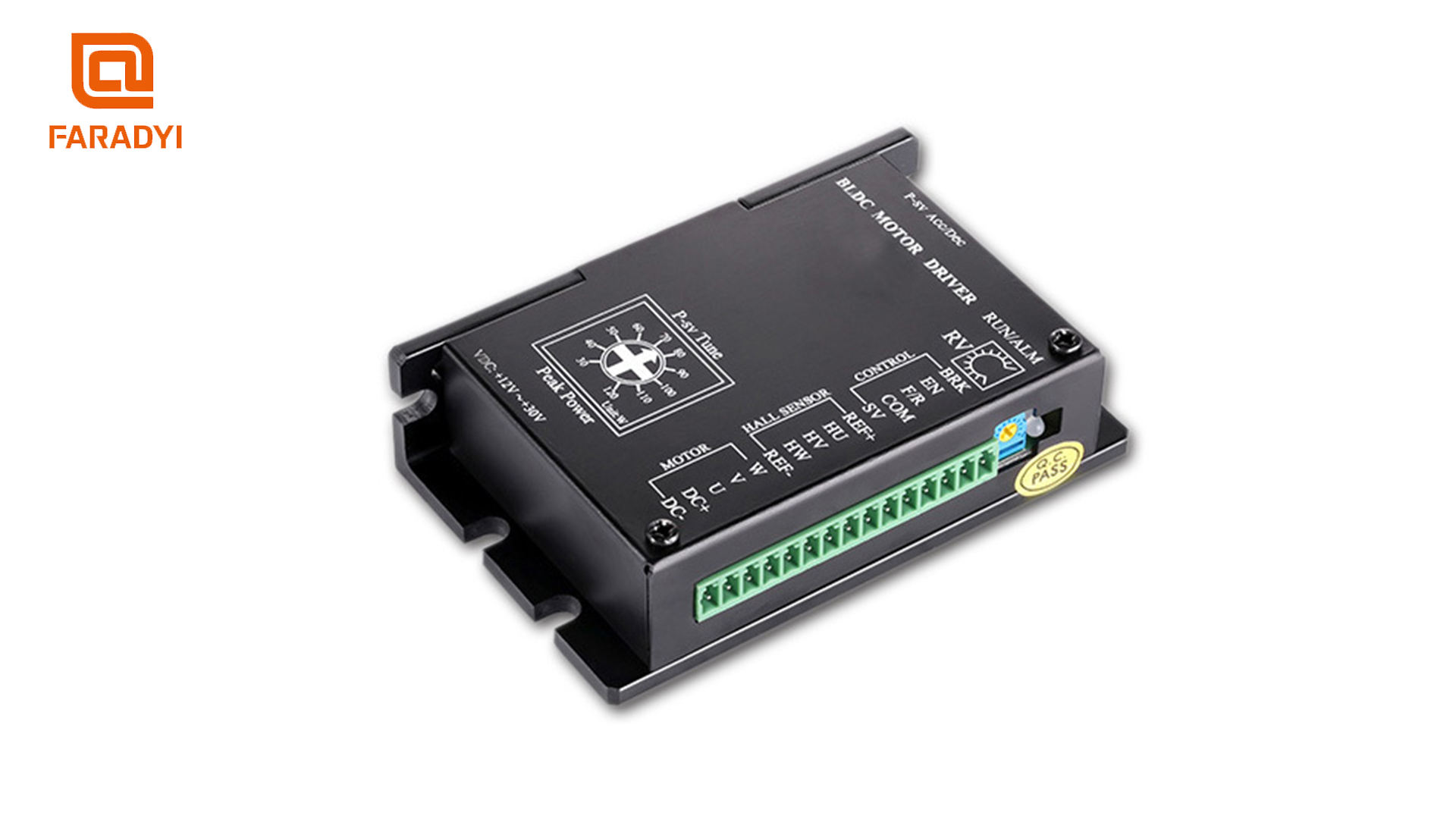
この記事では、ブラシレス ドライバ システムの動的プロセスに PID パラメータを適応させる方法について説明します。偏差の大きさ、偏差率、および制御量と設定値との近さに基づいて Kp 値と Ki 値を調整する方法について説明します。また、システム ダイナミクスを改善する上での微分動作の重要性についても説明します。
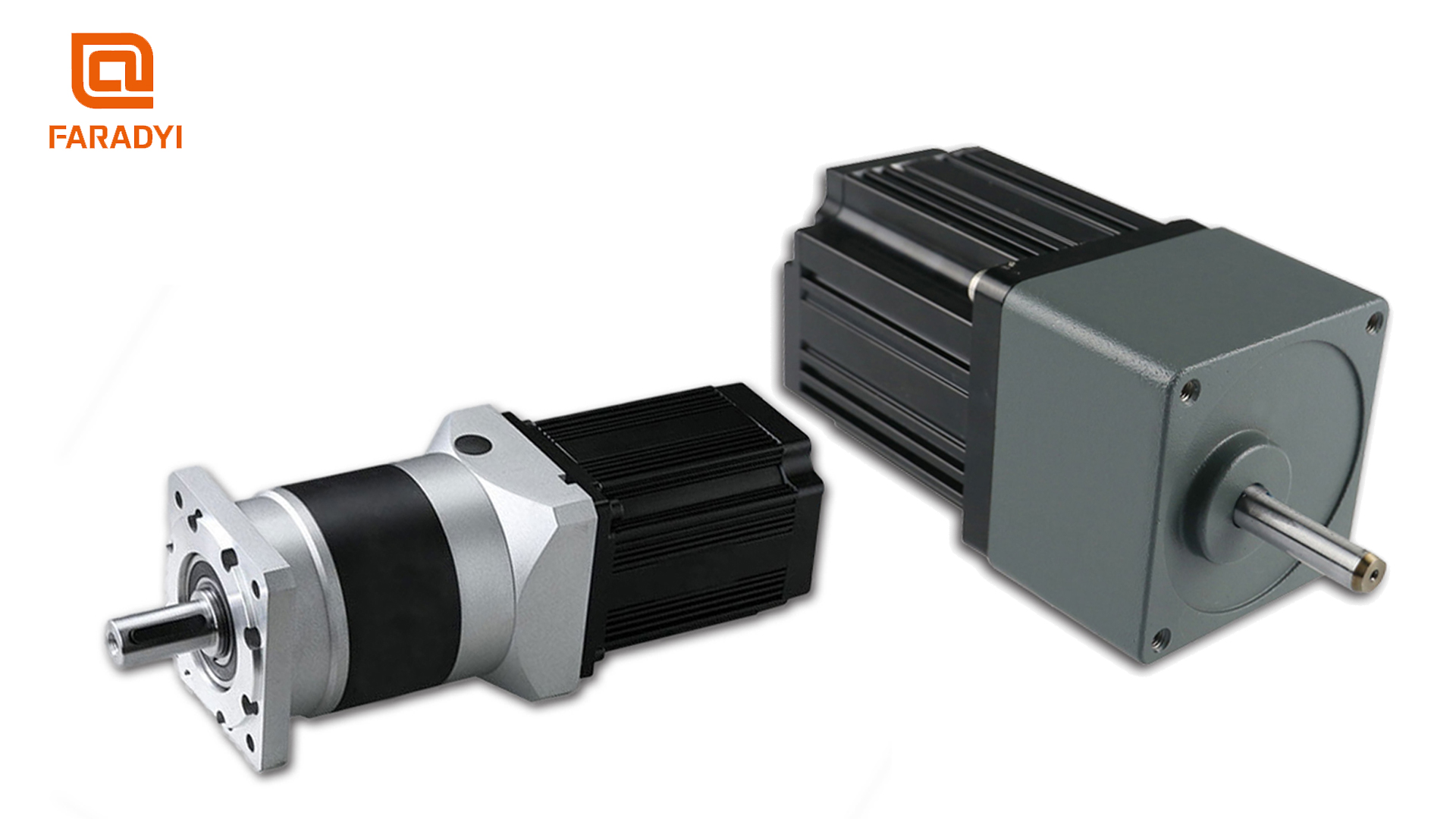
ブラシレスDCギアモーターは、ブラシレスDCモーターとギア減速ユニットを組み合わせて、速度を下げてトルクを増加させます。この記事では、ギア比の概念、ギア比の計算方法、モーターの出力トルク、速度、および電力の関係について説明します。また、ブラシレスDCギアのアプリケーションについても説明します。

ブラシレスDCギアモーターには、速度制御、マイクロコントローラ制御、正逆制御など、さまざまな制御方法があります。ブラシレスDCギアモーターは、低騒音、コンパクトサイズ、高効率、低エネルギー消費という利点があります。これらの制御方法を理解することは、ブラシレスDCギアモーターのパフォーマンスを最適化するために重要です。
この記事では、ブラシレスDCギアモーターについて、ギアボックスとブラシレスDCモーターの統合に重点を置いて説明します。動作原理、選択基準、接続方法について概説します。ブラシレスDCギアモーターは、従来のDCモーターに比べて優れた速度制御やメンテナンスの簡素化などの利点があります。この記事は、

ブラシレスDCモーターの動作特性により、始動戦略が不適切であれば始動電流が通常値よりはるかに高くなり、ハードウェア回路が損傷する可能性があります。一方、始動電流が小さすぎると電磁トルクが不十分になり、

ベクトル制御と正弦波制御は、ブラシレスモーターの制御方法の2つです。主な違いは電流制御方法にあります。ベクトル制御は、ローター磁場の平行方向と垂直方向のベクトル電流成分を直接制御し、コントローラーの帯域幅と位相ドリフトの制限を排除します。

高出力ブラシレス DC モーターは、産業機器の重要な駆動部品の 1 つであるため、通常の状況では過度の温度の問題は発生しません。ただし、機械設備の温度が異常に上昇したという報告が顧客からあった場合は、次の理由が考えられます。

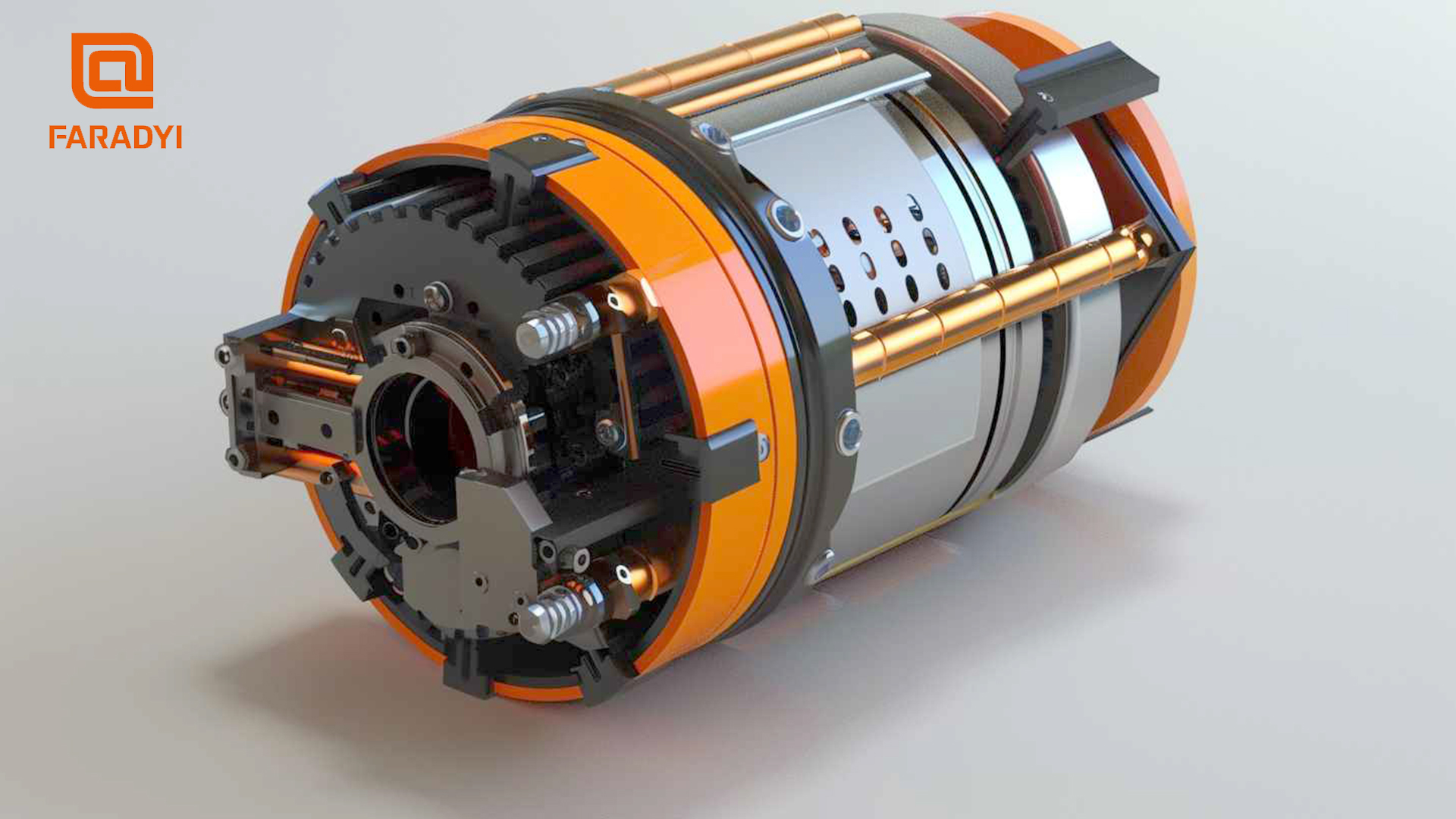
フレームレスモーターは、効率的で安定した電力ソリューションとして、工業製造、航空宇宙、医療機器などの分野で広く使用されています。この記事では、フレームレスモーターの構造、性能特性、応用分野、将来の開発展望を深く探り、フレームレスモーターの重要性と利点を示すことを目指しています。
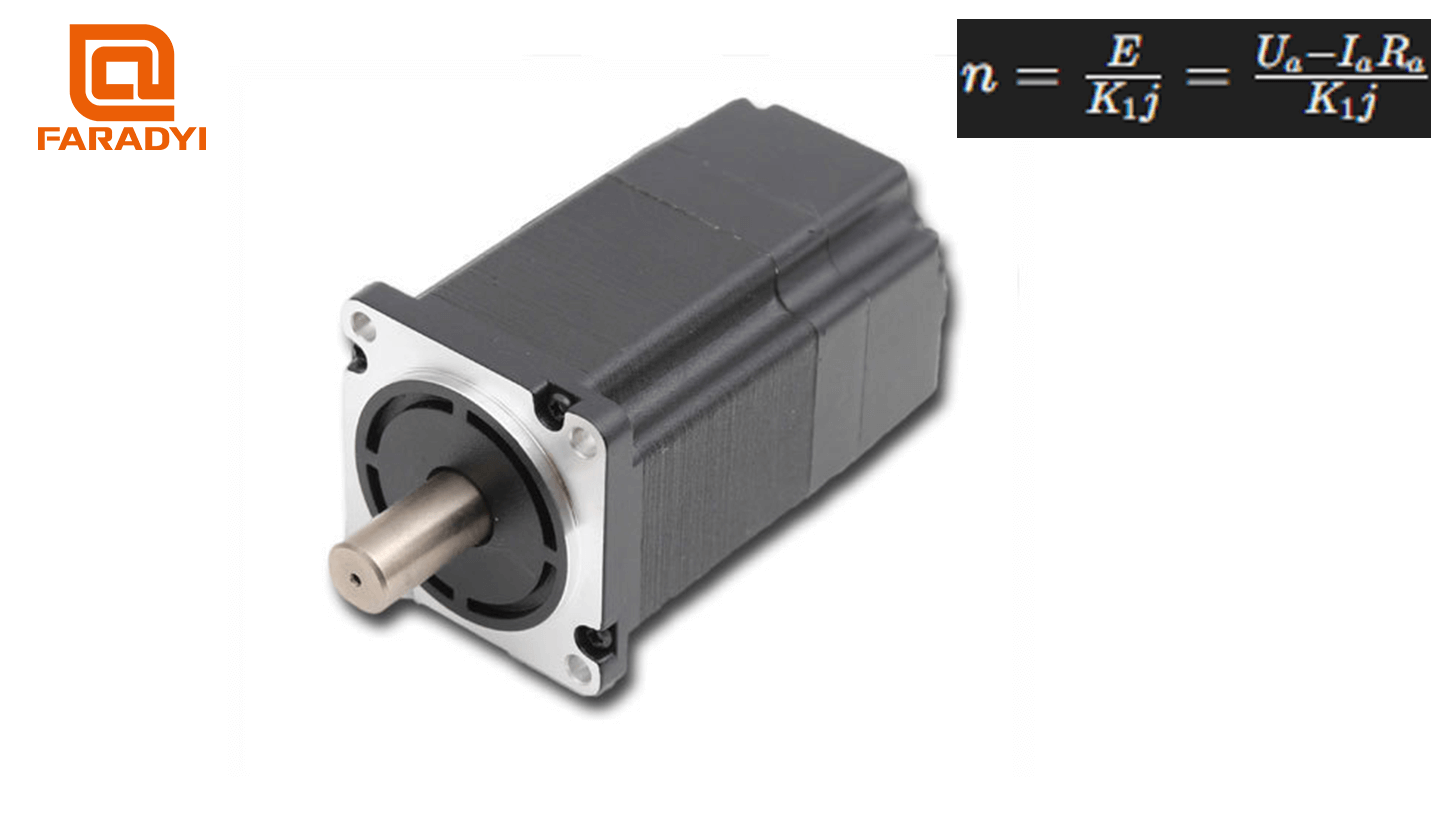
ステッピングモーターは、電気パルス信号を対応する角度または直線変位に変換します。各入力パルス信号により、ローターは特定の角度で回転するか、1ステップ前進します。出力角度または直線変位は入力パルスの数に比例し、速度は