Lorem ipsum dolor sit amet、consectetur adipiscing elit。ウト・エリート・テルス、ルクトゥス・ネク・ウラムコーペル・マティス、プルヴィナー・ダピブス・レオ。
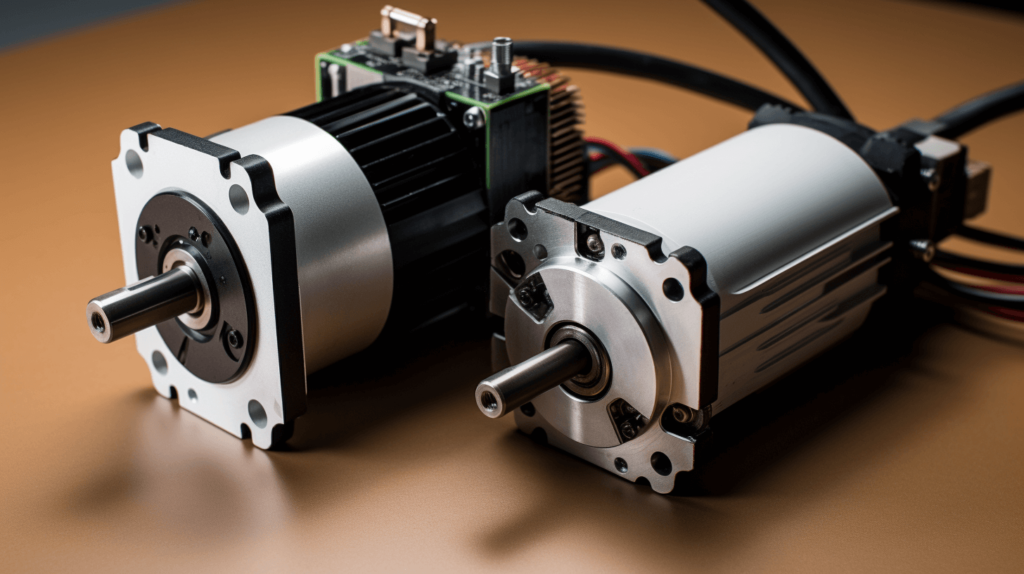
ステッピング モーターとサーボ モーターはどちらも、オートメーションやロボット工学のアプリケーションでよく使用されます。しかし、これら 2 つのモーター タイプの主な違いは何でしょうか。また、特定のプロジェクトに最適なモーターはどのようにして決定すればよいのでしょうか。このガイドでは、ステッピング モーターとサーボ モーターの構造、機能、長所と短所、コスト、理想的な使用例を比較します。
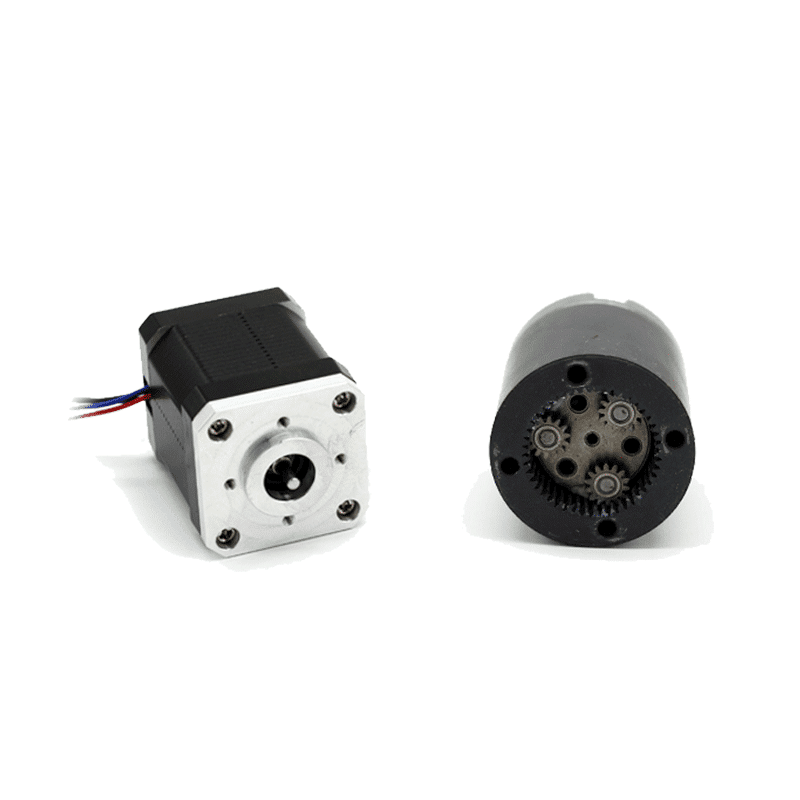
ステッピング モーターは、電気パルスを個別の機械的動作またはステップに変換することによって動作します。主な機能:
全体的に、ステッパーは、低速で高精度と保持トルクを必要とするアプリケーションに最適です。制御が簡単で、コスト効率の高いソリューションを提供します。
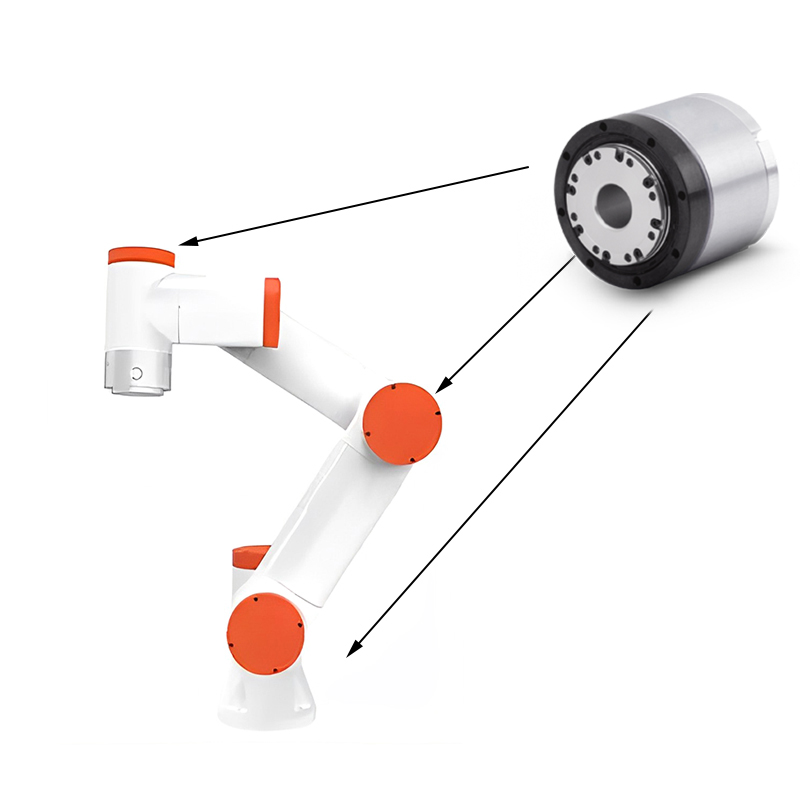
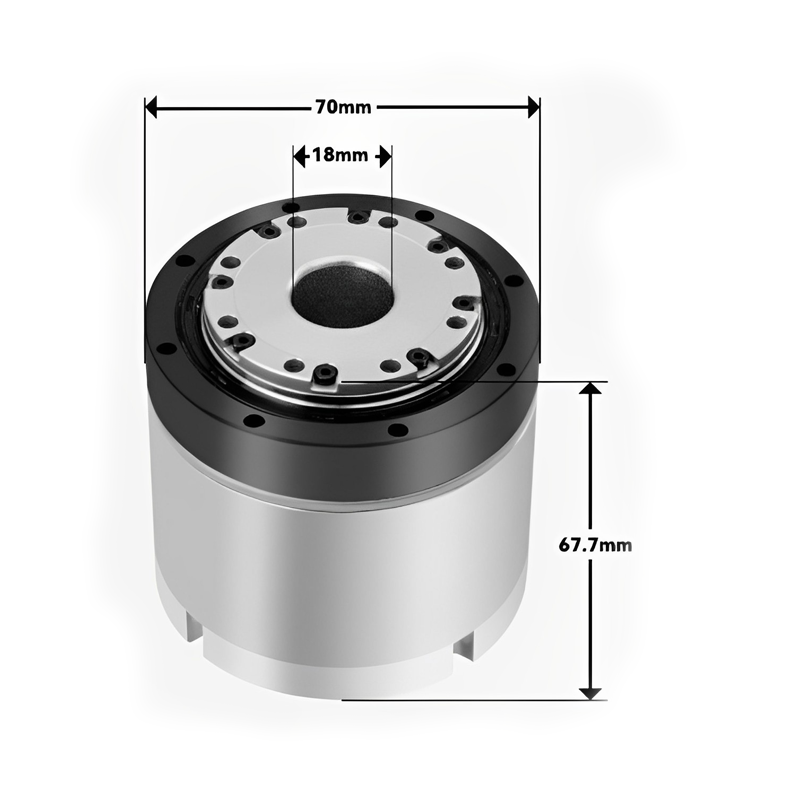
サーボモーターは位置フィードバックを使用して閉ループ速度とトルクを制御します。主な機能:
サーボは、高速、ダイナミックな動き、トルク調整を必要とするアプリケーションに最適です。精密な制御により、複雑なモーション プロファイルが可能になります。
これらの主な違いを理解することで、ステッパー モーターとサーボ モーターのどちらが自動化アプリケーションのニーズに最適かを判断できます。
ファラディの最近の投稿