

ブラシレスモーターのベクトル制御と正弦波制御には、ブラシレスモーターの電流を制御する方法という基本的な違いがあります。ブラシレスモーターの速度が増加すると、正弦波制御のPIコントローラーの帯域幅が限界に達し、制御が失敗します。対照的に、ベクトル制御は、ローター磁場の平行方向と垂直方向のベクトル電流成分を直接制御することにより、ステーターコイル電流の正確な制御を実現します。ベクトル制御では、電流制御は時間とともに変化せず、静的DC制御になるため、周波数応答と位相ドリフトの制限がなくなります。したがって、ベクトル制御モードでの電流品質は、モーターの速度とは関係ありません。
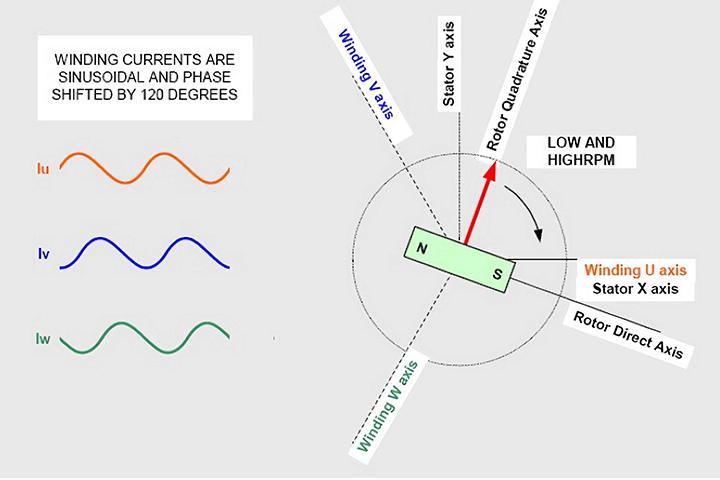
ベクトル制御の場合、ブラシレスモーターの電流と電圧の成分を主にローター磁界の平行方向と垂直方向で制御します。つまり、ブラシレスモーターから測定された電流を数学的に計算して、ステーターの3相静的構造からローターの動的dq構造(ローター磁界の方向に平行および垂直)に変換する必要があります。同様に、ブラシレスモーター側の制御電圧も数学的に計算して、ローターのdq構造からステーターの3相静的構造に変換し、PWM部に入力して変調する必要があります。これらの変換には高速な数学処理能力が必要なため、DSPと高性能プロセッサがベクトル制御の中核になります。
この変換は 1 回の計算で完了できますが、説明の便宜上、2 つのステップに分けます。まず、モーター電流は、位相差 120 度の固定子の物理的な 3 相構造から安定した動的な直角直交 dq 構造に変化し、次にこの固定子の動的構造を回転子の 3 相静的構造に変換します。有効な結果を保証するには、これらの計算を PI コントローラーの 1 つのサンプリング期間内に完了する必要があります。上記の変換は、PI コントローラーに必要な電圧信号を dq 構造から固定子コイルの 3 相構造に変換する操作の逆です。
ブラシレスモーターの電流をdq構造に変換すると、制御が非常に簡単になります。 2つのPIコントローラーが必要です。1つはローター磁場に平行な電流を制御し、もう1つはローター磁場に垂直な電流を制御します。 平行電流の制御信号はゼロなので、ブラシレスモーターの平行電流成分もゼロになり、ブラシレスモーターのすべての電流ベクトルが垂直電流に変換されます。 垂直電流のみが有効なトルクを生成できるため、これによりブラシレスモーターの効率が最大化されます。 別のPIコントローラーは主に垂直電流を制御し、入力信号と一致する必要なトルクを取得するために使用されます。 これにより、必要なトルクを得るために必要に応じて垂直電流が制御されることが保証されます。
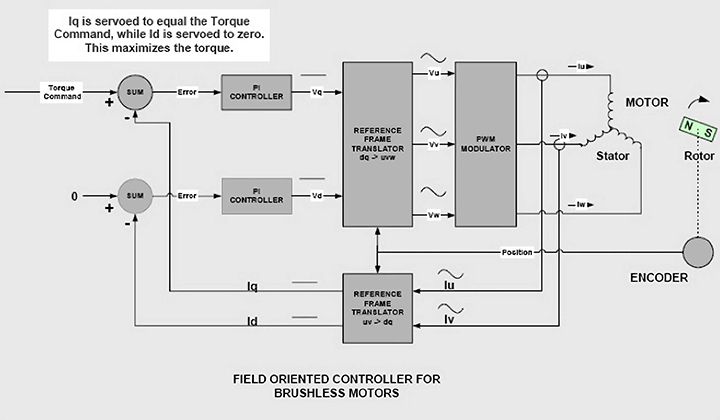
2 つの PI コントローラの出力信号は、ローターの電圧ベクトルを表します。これらの静的電圧ベクトルは、一連の基準座標変換を経て、出力ブリッジに必要な電圧制御信号を取得します。最初に、ローターの動的 dq 基準構造からステーターの静的 xy 構造に変換されます。次に、電圧信号は互いに 120 度離れた物理構造に変換され、最終的にブラシレス モーターの U、V、W の 3 相コイルに入力されます。これらの 3 つの電圧信号は、ブラシレス モーター コイルに入力される前に PWM 変調される必要があります。
ブラシレスモーターコイル内の時間変化する正弦波電流および電圧信号をdq構造のDC信号に変換する作業が、基準座標の変換です。
正弦波整流とベクトル制御の本質的な違いは、座標変換と電流制御の処理方法にあります。正弦波整流法では、まず整流を行い、次にPI制御によって必要な正弦波電流を取得します。したがって、システムのPI制御は、ブラシレスモーターの電流と電圧の時間変動正弦波信号を主に処理し、ブラシレスモーターの性能はコントローラーの帯域幅と位相ドリフトによって制限されます。ベクトル制御では、電流信号は最初にPIによって制御され、次に高速整流処理が行われます。したがって、PIコントローラーは時間変動電流と電圧信号を処理する必要がなく、システムはPIコントローラーの帯域幅と位相ドリフトの影響を受けません。
では、なぜベクター制御が優れているのでしょうか?
ベクトル制御は、低速でも高速でもモータを滑らかに動作させます。対照的に、正弦波整流は低速で滑らかな動作を可能にしますが、高速での効率が大幅に低下します。台形波整流は、モータが高速で動作しているときは正常に動作しますが、低速ではトルク変動を引き起こします。したがって、ベクトル制御は、 ブラシレスモーター.










