関節アームロボットに適したモーターを選ぶための 6 つの基準

研究や教育に特化した協働ロボットに適したモーターを選択することは、正確で効率的な動きを実現するために非常に重要です。このようなロボットのモーターを選択する際に考慮すべき重要な基準は次のとおりです。
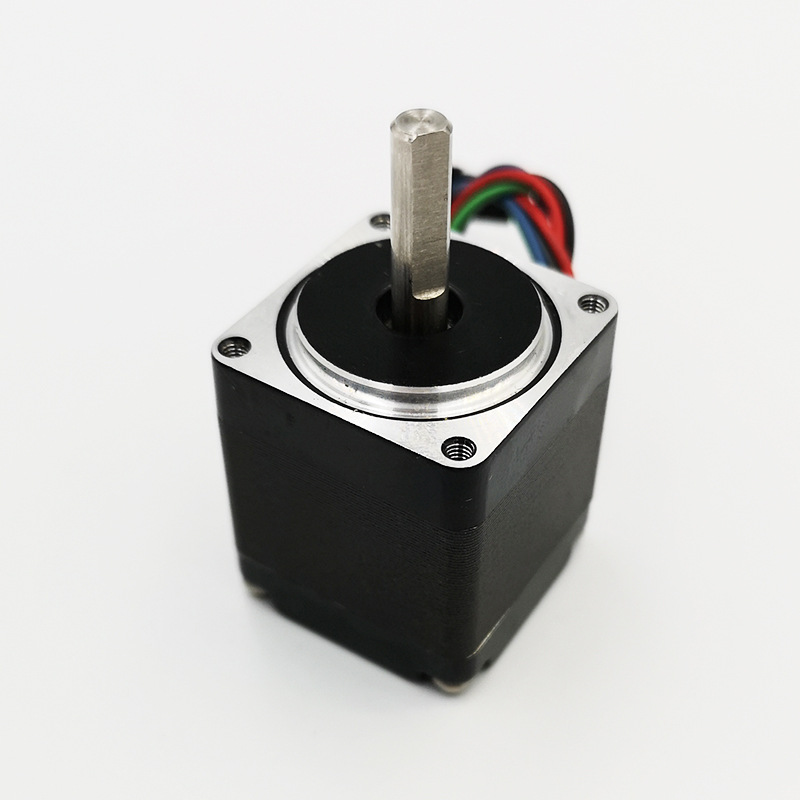
1. パワーとトルク
- ロボットが処理する必要がある最大重量を決定します。安全性と将来の拡張のためにある程度の余裕を持って、少なくともこの積載量を処理できるモーターを選択します。
- 減速機のギア比が高いほど、モーターの最大加速度が高くなります。
2. 最大加速
- トルクは、モーターによって提供される回転力です。トルクの高いモーターは、より重い負荷を処理でき、困難なタスクでより優れたパフォーマンスを発揮します。ロボットが相互作用する物体の重量と種類に基づいて、トルク要件を検討してください。
3. 精度と正確さ

- 研究や教育の目的には、正確で精密な動きが不可欠です。高精度でバックラッシュの少ないモーターにより、ロボットは確実にタスクを繰り返すことができます。
4.電力効率
- 電力効率の高いモーターはロボットのバッテリー寿命を延ばし、動作中の充電頻度を減らすのに役立ちます。
5.安全機能
- 協働ロボットは人間のすぐ近くで作業するため、安全性が非常に重要です。過熱や潜在的な危険を防ぐために、電流制限や熱保護などの安全機能が組み込まれたモーターを探してください。
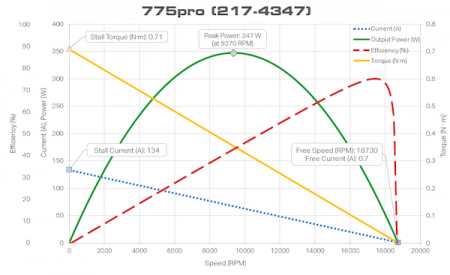
6.スピード
- モーターの速度はロボットの動作能力に影響します。アプリケーションによっては、素早い動作のための高速動作と、より正確なタスクのための低速動作のバランスを取る必要がある場合があります。
- 産業用ロボットアームは高速性能が求められることが多いが、 教育用に設計されたものは通常、速度要件が低くなります。 しかし、 高速回転が可能なモーター ロボットが高速動作を実行する必要があるときなど、特定の用途では依然として有益である。 またはより高い動作周波数が必要な場合 ロボットの使用によるとセス.
- 教育用アームロボットの速度は用途によって異なりますが、一般的には 速度範囲が10~100 RPMのモーター減速機 ほとんどの用途では十分です。また、モーターは、正確で精密な動きを保証するために、動作範囲全体にわたって一定の速度を維持できる必要があります。
7.可用性とサポート
- 選択したモーターのスペアパーツとテクニカル サポートの可用性を確認してください。スペアパーツと信頼できるサポートを利用できると、問題が発生した場合のダウンタイムを大幅に短縮できます。