導入
ステッピング モーターは、電気パルス信号を対応する角度または直線変位に変換します。各入力パルス信号により、ローターは特定の角度で回転するか、1 ステップ前進します。出力角度または直線変位は入力パルスの数に比例し、速度はパルス周波数に比例します。したがって、ステッピング モーターは、パルスを角度 (または直線) 変位に変換するコンポーネントとして機能します。
ステッピング モーターには、多極分散型ローターと多相スター接続制御巻線を備えたステーターがあります。入力パルス信号ごとに、ステッピング モーターのローターが 1 ステップ進みます。入力がパルス信号であるため、出力角度変位は不連続であり、「パルス モーター」という名前が付けられています。
デジタル制御システムの発展に伴い、ステッピングモーターの用途は徐々に拡大します。ステッピングモーターは、その構造に基づいて、リアクティブ、励磁、ハイブリッドなどのさまざまなタイプがあり、相数に基づいて単相、二相、多相に分類できます。
低電圧DCサーボモーター
低電圧 DC サーボ モーターは、制御信号のコマンドに厳密に従うモーターとして理解できます。制御信号が発行されるまでローターは静止したままで、信号が発行されるとローターはすぐに回転し、制御信号が消えるとローターは即座に停止します。
低電圧 DC サーボ モーターは、自動制御装置の駆動部品として使用されるマイクロ モーターで、電気信号をシャフトの角変位または角速度に変換します。主な特徴は、信号電圧がゼロのときに自己回転しないこと、トルクが増加すると速度が低下すること、速度と位置を非常に正確に制御できることなどです。
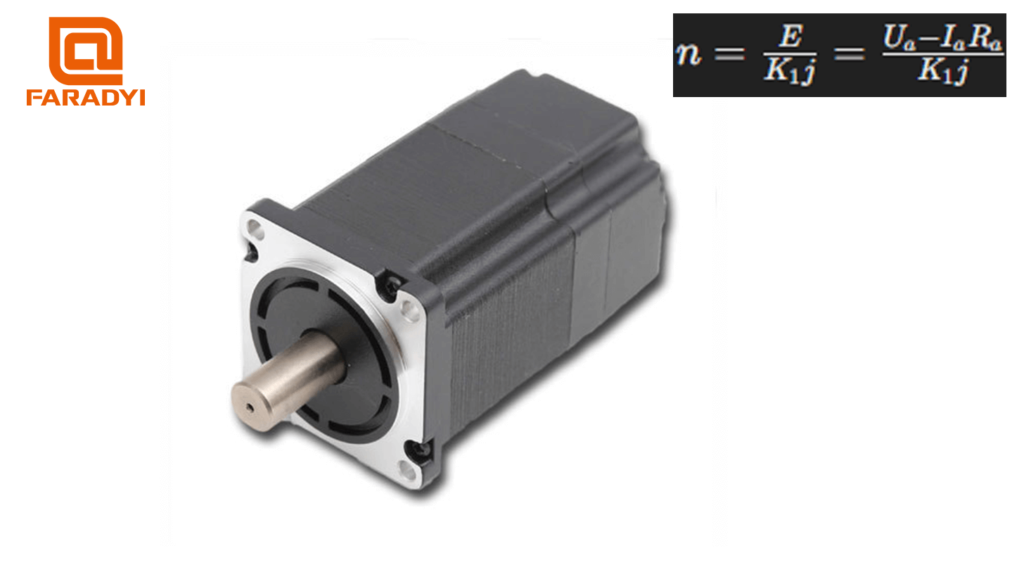
低電圧DCサーボモーターの基本構造は、一般的なDCモーターと似ています。
モーター速度 ん は次の式で与えられます。
どこ え アーマチュア逆起電力は、 け 定数である、 じ は極ごとの磁束であり、 うあ そして、 イア アーマチュア電圧と電流であり、 ラ アーマチュア抵抗です。 うあ または ϕ 低電圧DCサーボモータの速度を制御できます。ただし、一般的には電機子電圧を制御する方法が採用されています。永久磁石低電圧DCサーボモータでは、励磁巻線が永久磁石に置き換えられ、磁束が保持されます。 ϕ 一定。低電圧 DC サーボ モーターは、優れた線形調整特性と高速応答時間を備えています。
低電圧 DC サーボ モーターとステッピング モーターの性能特性の比較:
ステッピング モーターと低電圧 DC サーボ モーターはどちらも制御方法 (パルス列と方向信号) が似ていますが、パフォーマンスとアプリケーション シナリオには大きな違いがあります。パフォーマンス特性を比較してみましょう。
制御精度の違い:
-
- ステッピングモーターの相数: これは、モーター内部のコイルグループの数を指します。一般的に使用されるステッピングモーターには、2相、3相、4相、5相の構成があります。異なる相番号は、異なるステップ角度に対応します。たとえば、2相モーターのステップ角度は通常0.9°/1.8°、3相モーターは0.75°/1.5°、5相モーターは0.36°/0.72°です。細分化されたドライバーがない場合、ユーザーは主にステップ角度の要件を満たすために異なる相番号を持つステッピングモーターを選択します。細分化されたドライバーでは、「相番号」は意味をなさなくなり、ユーザーはドライバーの細分番号を変更することでステップ角度を変更できるようになります。
- 低電圧DCサーボモーターの制御精度: これは、モーター シャフトの後端にあるロータリー エンコーダによって保証されます。標準の 2500 ライン エンコーダを備えたモーターの場合、ドライバーが 4 倍化テクノロジを使用しているため、パルス相当は 360°10000=0.036°10000360°=0.036° です。17 ビット エンコーダを備えたモーターの場合、ドライバーはモーター 1 回転あたり 131,072 パルスを受信するため、パルス相当は 360°131072=0.0027466°131072360°=0.0027466° となり、これはステップ角が 1.8° のステッピング モーターのパルス相当の 1/655 です。
低周波特性の違い:
-
- ステッピングモーターの低周波振動: ステッピング モーターは、低速時に低周波振動を起こしやすい傾向があります。振動周波数は、負荷状態とドライバーの性能によって異なります。振動周波数は通常、モーターの無負荷始動周波数の半分です。ステッピング モーターの動作原理によって決まるこの低周波振動は、通常の機械動作に非常に悪影響を及ぼします。ステッピング モーターが低速で動作する場合、低周波振動を克服するために、モーターにダンパーを追加したり、ドライバーにサブディビジョン技術を使用したりといった減衰技術が通常使用されます。
- 低電圧DCサーボモーターの安定動作: 低電圧 DC サーボ モーターは、低速でも振動がなくスムーズに動作します。低電圧 DC サーボ システムは、機械剛性の不足を補う共振抑制機能を備えています。さらに、システム内部に周波数解析機能 (FFT) を備えており、機械共振点を検出してシステム調整を容易にします。
トルク-周波数特性の違い:
-
- ステッピングモーターの出力トルク: ステッピング モーターの出力トルクは速度が上昇するにつれて減少し、さらに高速になると急激に低下します。そのため、最大動作速度は通常 300 ~ 600 RPM です。
- 低電圧DCサーボモーターの定トルク出力: 低電圧 DC サーボ モーターは一定のトルク出力を提供し、定格速度を超える速度で定格トルクを供給できるため、一定の電力出力が得られます。
過負荷容量の違い:
ステッピング モーターには一般に過負荷容量がありません。低電圧 DC サーボ モーターには強力な過負荷容量があります。
低電圧 DC サーボ モーターには、速度とトルクの過負荷機能があります。最大トルクは定格トルクの 3 倍で、起動時に負荷の慣性トルクを克服するために使用できます。
ステッピング モーターにはこの過負荷容量がありません。そのため、この慣性トルクを克服するために、より大きなトルクを持つステッピング モーターが選択されることが多く、通常の機械動作中にトルクが無駄になります。
運用パフォーマンスの違い:
-
- ステッピングモーターの制御: ステッピング モーターはオープン ループ制御で動作します。起動頻度が高い場合や負荷が大きすぎる場合は、ステップが欠落したり、モーターが停止したりする可能性があります。停止時には、高速回転によりオーバーシュートが発生する可能性があります。したがって、制御精度を確保するには、加速と減速の問題を適切に処理する必要があります。
- 低電圧DCサーボシステムの制御: 低電圧 DC サーボ ドライブ システムは、閉ループ制御で動作します。ドライバーはモーター エンコーダ フィードバック信号を直接サンプリングして、内部で位置ループと速度ループを形成し、ステッピング モーターに関連するステップの欠落やオーバーシュート現象を回避し、より信頼性の高い制御パフォーマンスを確保します。
速度応答性能の違い:
-
- ステッピングモーター: ステッピング モーターが停止状態から動作速度 (通常は毎分数百回転) まで加速するには、200 ~ 400 ミリ秒かかります。
- 低電圧DCサーボシステム: 低電圧DCサーボシステムは加速性能に優れており、停止状態から定格速度3000 RPMまで加速するのに数ミリ秒しかかからないため、迅速な始動を必要とする制御アプリケーションに適しています。