- (+086) 18923470557
- 販売元
- 中国広東省東莞市大朗鎮仏福路53号7階、523770







EtherCAT、CANopen、Modbus 通信プロトコルを搭載。
位置、速度、電流ループ PID をリアルタイムで調整可能。
± 10V アナログ入力を内蔵。
パルスと方向、I/O、RS485、
外部エンコーダとSTOインターフェース、
すべてDxL=70x67mmのスペースに収まります
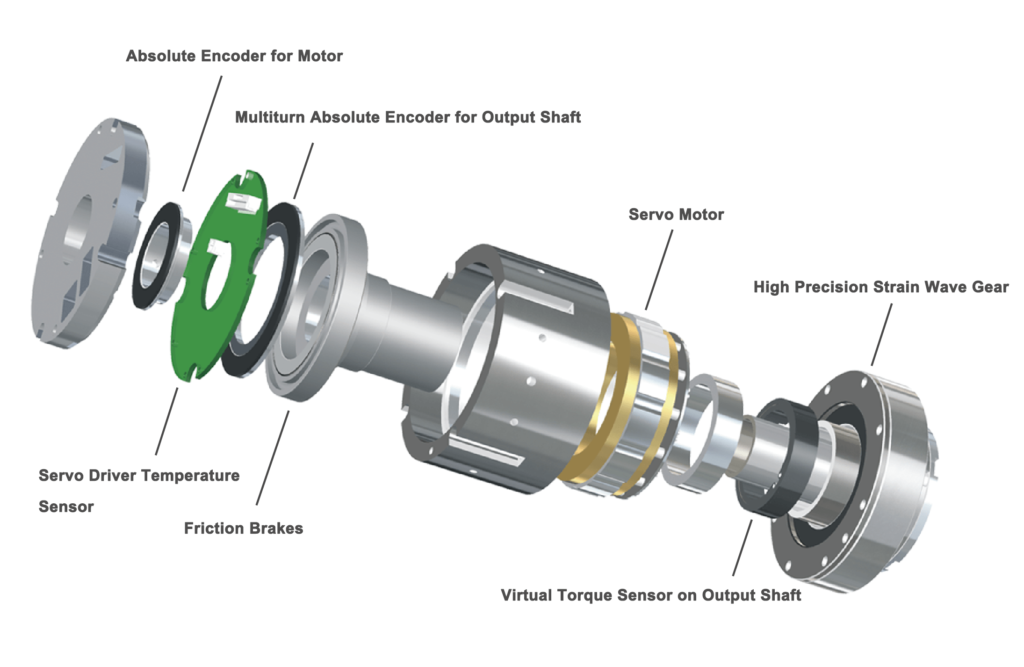
出力シャフト用の 19 ビット絶対マルチターン エンコーダー。
繰り返し精度は最大±7秒角です。
絶対精度は最大±15秒角。
電源オフ時でも常に実際の絶対位置とマルチターンカウンターを保持します。

ブレーキはスムーズかつ安定しています。
隙間なし、バックラッシュなし。
電源投入時に移動する必要はありません。
消耗はありません。
緊急停止としても使えます。