- (+086) 18923470557
- 販売元
- 中国広東省東莞市大朗鎮仏福路53号7階、523770













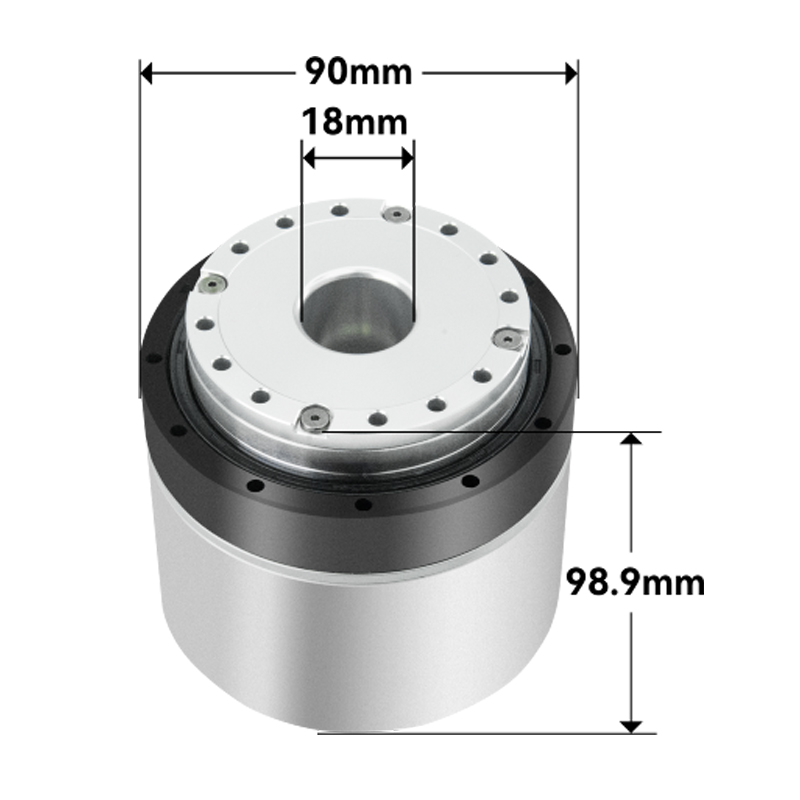
シームレスなメカトロニクスを実現するプレミアム コンポーネントを統合したオールインワン ジョイント モジュールを使用して、ロボットの構築を効率化します。
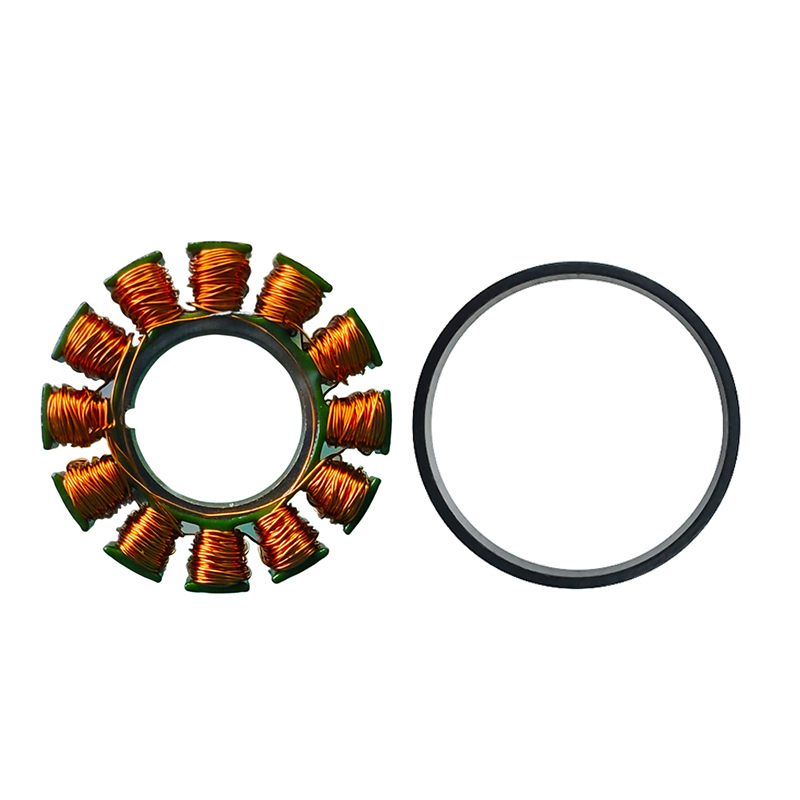
中心には、絶対エンコーダを備えた超小型のフレームレス トルク モーターがあり、ギアのバックラッシュなしで直接駆動力を提供します。これは、低慣性、ゼロ遊びの高調波減速機と結合して、非常に大きなトルク出力を実現します。
両側のデュアルアブソリュートエンコーダは、クローズドループ制御のためのリアルタイムの位置フィードバックを提供します。統合ブレーキは静止時にジョイントをロックし、ジッターを排除します。内蔵サーボドライブはロボットコントローラーに直接接続され、プラグアンドプレイでインストールできます。
すべてのコンポーネントは完璧に調和して動作し、ロボット工学の専門家によって事前に統合およびテストされています。この標準化されたモジュールは何百もの部品を置き換え、設計の複雑さ、組み立て時間、および潜在的な障害を大幅に削減します。
精巧なパッケージと使いやすさで、当社の数十年にわたるロボット工学の経験をお客様の次世代設計に活かします。取り付け、配線、プログラミングするだけで、すぐに稼働できます。
コンポーネントの統合ではなく、革新的なエンジニアリングに注力してください。このジョイント モジュールにより、ロボットの構築がよりシンプル、高速、かつ信頼性が高まります。
EtherCAT、CANopen、Modbus 通信プロトコルを搭載。
位置、速度、電流ループ PID をオンラインで調整可能。
± 10V アナログ入力を内蔵。
パルスと方向、I/O、RS485、
外部エンコーダとSTOインターフェース、
すべてDxL=70x67mmのスペースに収まります
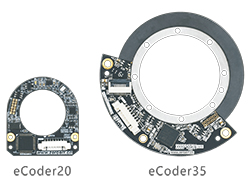
出力シャフト用の 19/20 ビット絶対マルチターン エンコーダ。
繰り返し精度は最大±7秒角です。
絶対精度は最大±15秒角。
電源オフ時でも常に実際の絶対位置とマルチターンカウンターを保持します。

ブレーキはスムーズかつ安定しています。
隙間なし、バックラッシュなし。
電源投入時に移動する必要はありません。
消耗はありません。
緊急停止としても使えます。
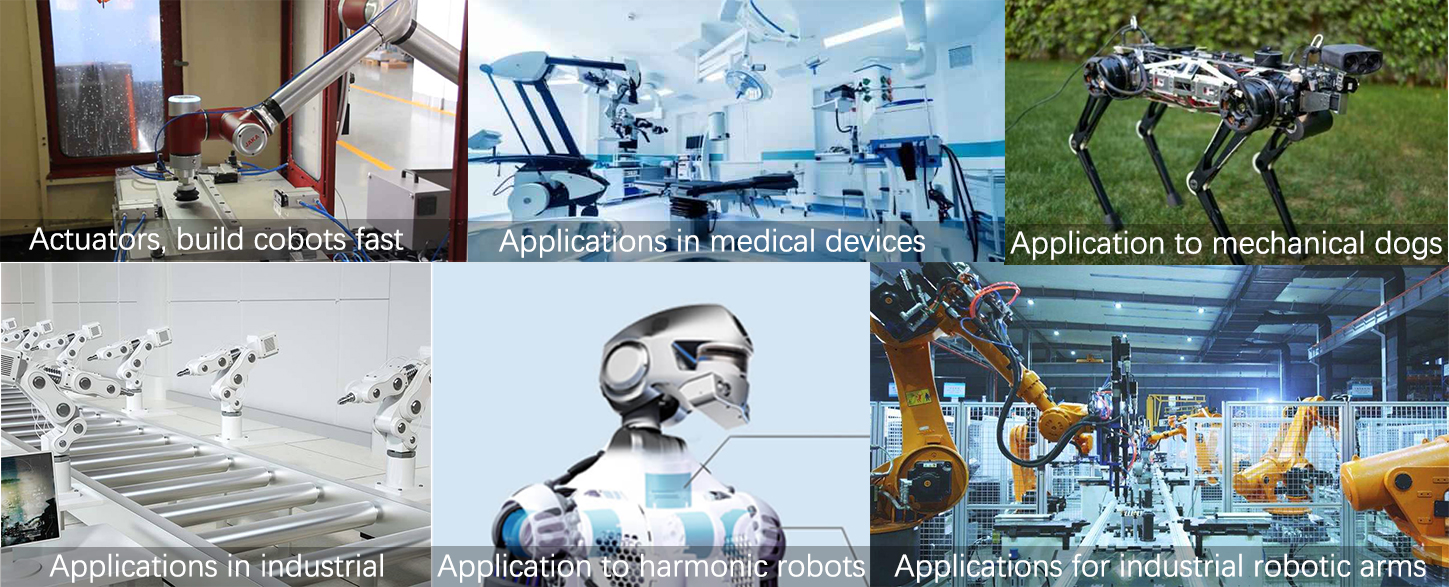
アプリケーション
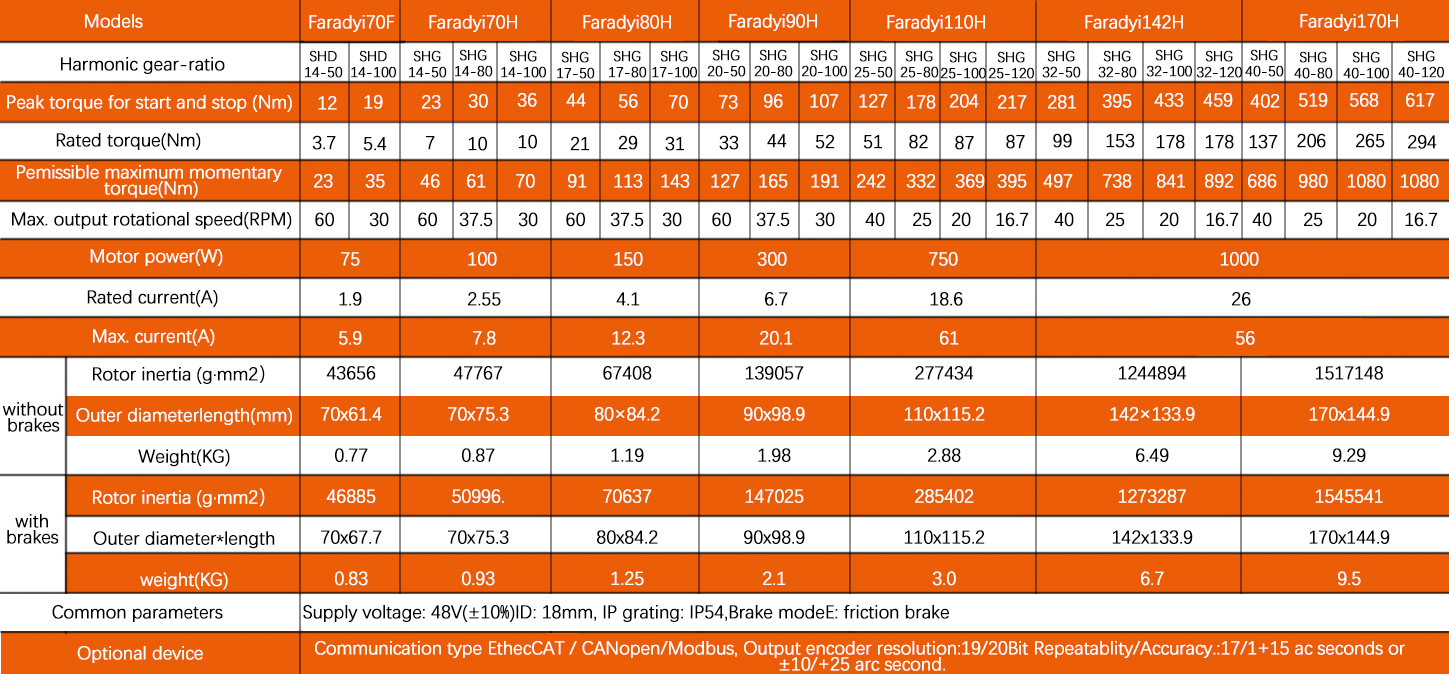
以下はハーモニックモーターのすべての製品パラメータです
ダウンロード
ファラディ110H××I_V3 2Dと3D
ファラディ110H××I_V4 2Dと3D
Faradyi110Iモジュール(MC.1A.7C.3B)2Dおよび3D
上記はこの製品の2D/3D図面です。必要な場合はお問い合わせください。
製品に関するご要望やご質問がございましたら、お気軽に以下の連絡先までお問い合わせください。