- (+086) 18923470557
- [email protected]
- 7F, No.53 Fofu Road, Dalang Town, Dongguan City, Guangdong, CN,523770



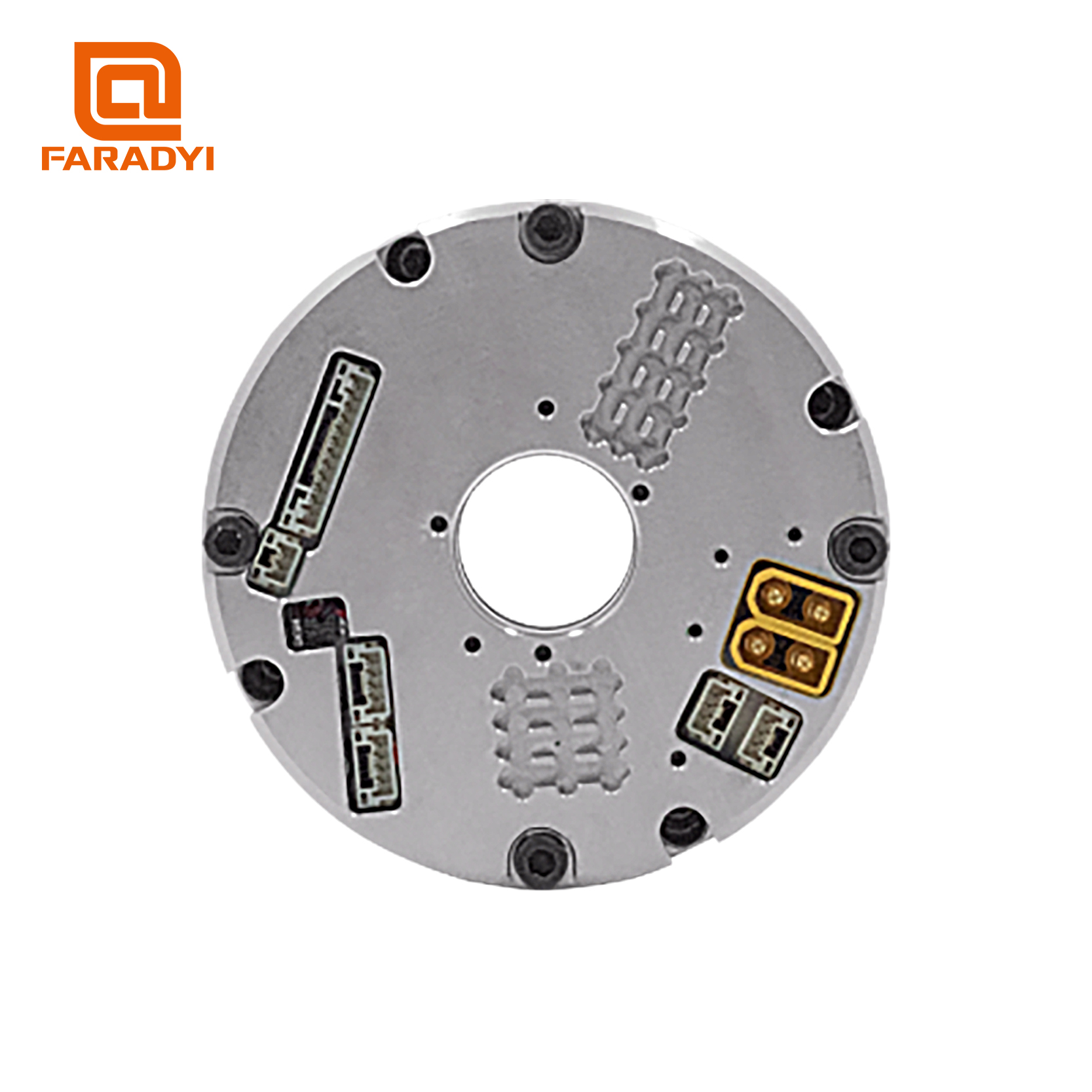




With EtherCAT, CANopen, Modbus communication protocols.
Position,Speed, Current loop PID adjustable in real-time.
Built-in ± 10V analog input.
Pulse and direction, I/O, RS485,
External encoder and STO interface,
All in the space of DxL=70x67mm
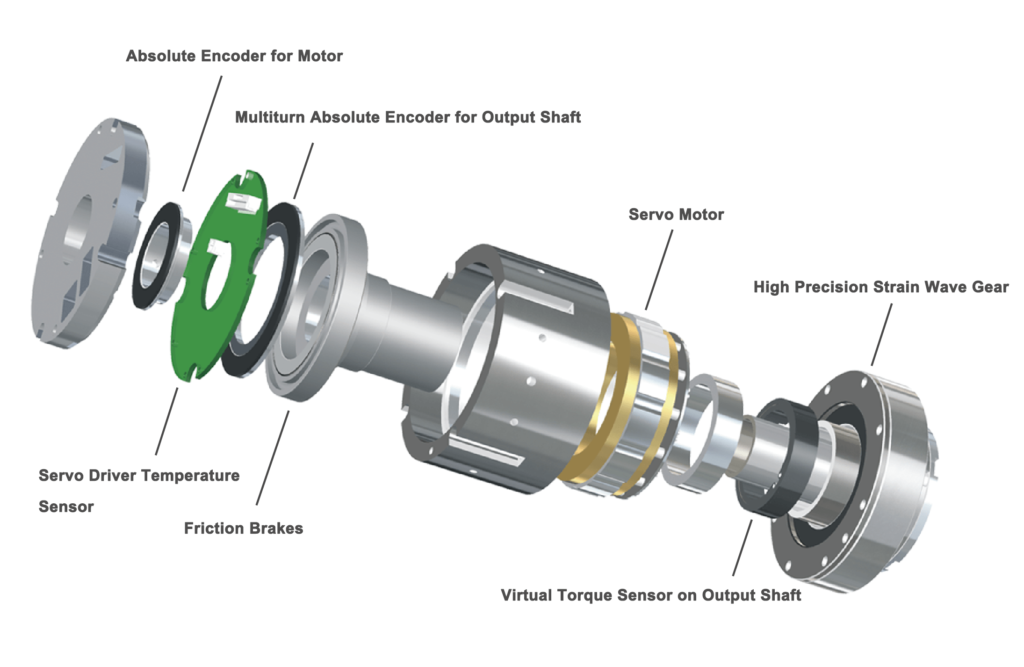
19bit absolute multiturn encoder for output shaft.
Repeatability up to ±7 arc seconds.
Absolute accuracy up to ±15 * arc seconds.
Always have real absolute position and multi-turn counter when power-off.

Brake smooth and stable.
No gap; No backlash.
No need to move when power-on.
No wear and tear.
Can be used as Emergency Stop.