1. Como selecionar a fonte de alimentação do robô?

2. Quais são as diferenças entre módulos de junta monovolta e multivolta?
3. Qual é a precisão das juntas do robô?
4. Como é o ruído operacional dos módulos articulados do robô?
5. O motor não consegue atingir a posição alvo corretamente.
6. A tensão do barramento está abaixo da configuração de tensão mínima permitida.
7. A tensão do barramento está acima da configuração de tensão máxima permitida.
8. As correntes de fase (U/V/W) excedem a corrente de pico permitida.
9. Disparo de corrente máxima (corte).
10. Tratamento de erros: Corrente trifásica do motor e erro.
11. Erro de bateria do codificador multivoltas na extremidade da carga.
12. Configuração de parada do motor.
13. O erro de posição excede o erro máximo permitido.
14. O erro de velocidade excede o erro de velocidade máximo permitido.
15. A velocidade do motor excede a configuração de velocidade máxima permitida.
16. O que representam o torque nominal e o torque máximo permitido?
17. O que deve ser considerado antes de instalar juntas com funcionalidade volta única/múltipla volta?
18. Como é calculada a força de torque de flexão para módulos de junta eRob?
Método de cálculo para momento estático de carga máxima (Mmax):
Confirme Mmax ≤ Mc (veja os símbolos das fórmulas na Tabela 1-2).
Tabela 1-1 Explicação dos símbolos das fórmulas:
- Frmax: Carga radial máxima (N ou kgf) – Consulte o diagrama de carga externa.
- Famax: Carga axial máxima (N ou kgf) – Consulte o diagrama de carga externa.
- Lr, La: __ (unidade não especificada, possivelmente metros) – Consulte o diagrama de carga externa.
- R: Offset (m) – Consulte o diagrama de carga externa na tabela de especificações de cada série.
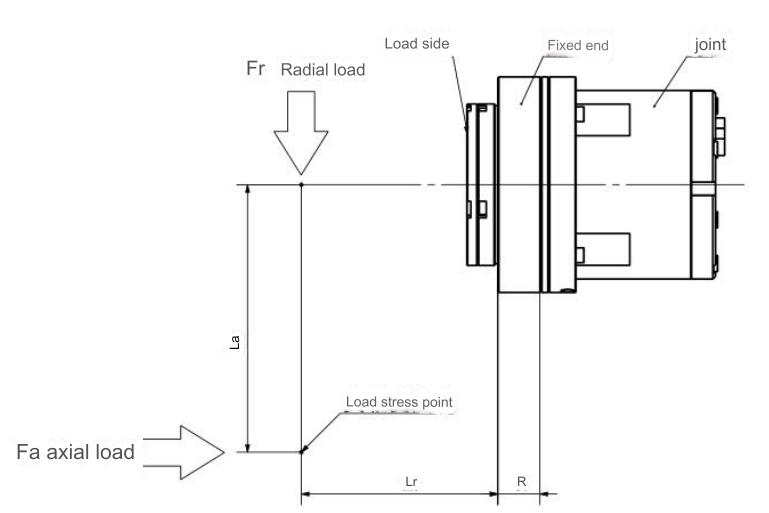
Tabela 1-2 Valores de torque permitidos para cada tipo de junta:
| Tipo de junta | Deslocamento (R) | Carga de Torque Admissível (Mc) |
|---|---|---|
| eRob70 | 0,0217m | 74 Nm / 7,6 Kgfm |
| eRob80 | 0,0239m | 124 Nm/12,6 Kgfm |
| eRob90 | 0,0255m | 187 Nm/19,1 Kgfm |
| eRob110 | 0,0296m | 258 Nm/26,3 Kgfm |
| eRob142 | 0,0364m | 580 Nm/59,1 Kgfm |
| eRob170 | 0,044m | 849 Nm/86,6 Kgfm |
Exemplo: Dada a seleção da junta eRob70H com La = 0,2m, Lr = 0,5m, Frmax = 50N e Famax = 30N.
Da Tabela 1-2, R = 0,0217m, Mc = 74 Nm.
Substitua na fórmula:
Desde , satisfaz os requisitos de torque de flexão.
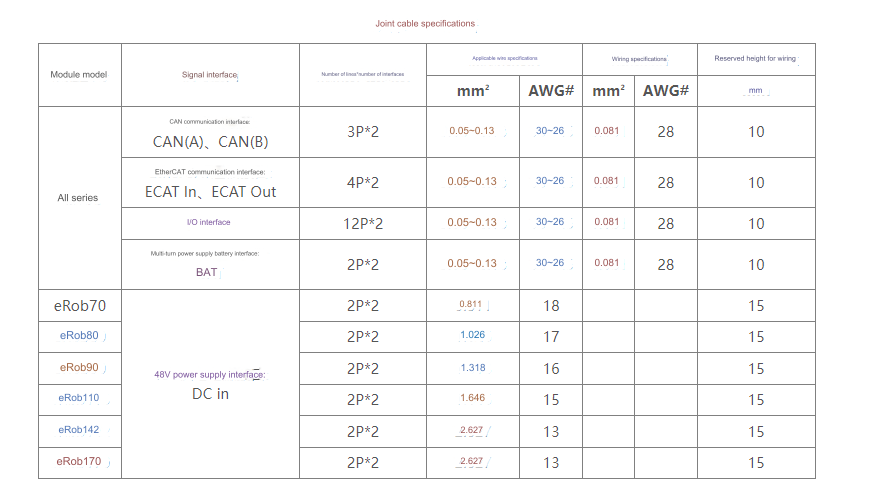
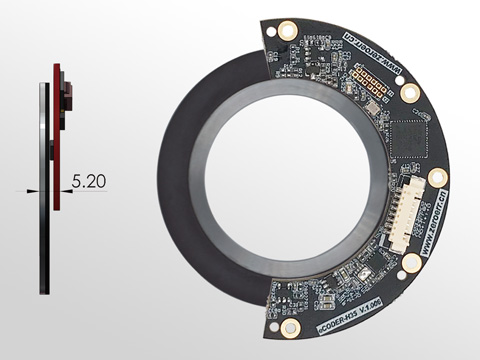
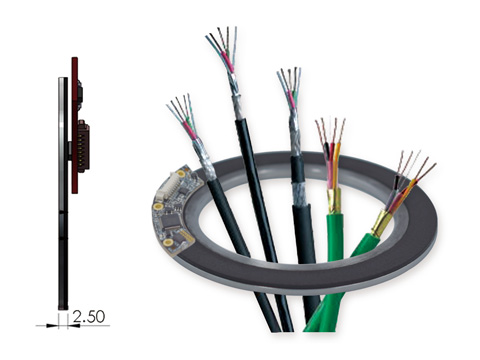
19. Quais são as especificações dos cabos e as alturas de reserva da fiação para os módulos de junta do robô eRob?

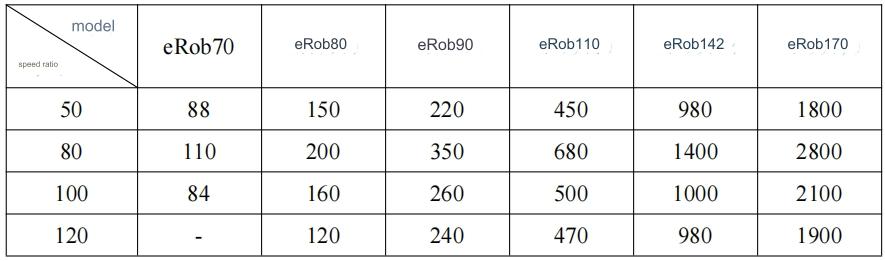
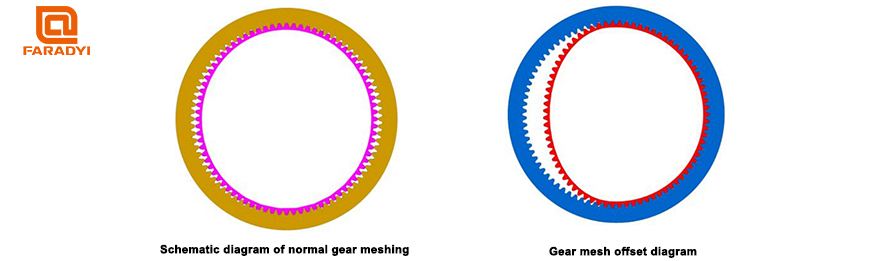
20. Qual é o fenômeno da engrenagem?
Em um módulo de junta de robô, quando sujeito a um torque de impacto excessivo durante a operação, o engate entre a roda rígida e as engrenagens da roda flexível pode mudar momentaneamente, mesmo se os componentes, como a estria flexível da caixa de engrenagens, permanecerem intactos. Este fenômeno é conhecido como “reação”. O torque durante esta ocorrência é conhecido como torque de folga (consulte os valores na tabela abaixo). Se o fenômeno de folga persistir durante a operação, as partículas de desgaste geradas pela folga podem levar ao desgaste prematuro da engrenagem, reduzindo assim a vida útil dos rolamentos de acionamento harmônico.
É crucial resolver e mitigar prontamente os problemas de folga para evitar operação prolongada sob tais condições, minimizando o impacto na longevidade da engrenagem e no desempenho harmônico do rolamento de acionamento.
O engrenamento normal das engrenagens é mostrado no diagrama inferior esquerdo. Quando um cão é engatado, as engrenagens podem engrenar de forma anormal, conforme ilustrado no diagrama inferior direito, com um deslocamento unilateral. A operação contínua neste estado pode resultar em vibrações, causando danos à engrenagem flexível.
21. Como conectar módulos conjuntos usando TwinCAT?
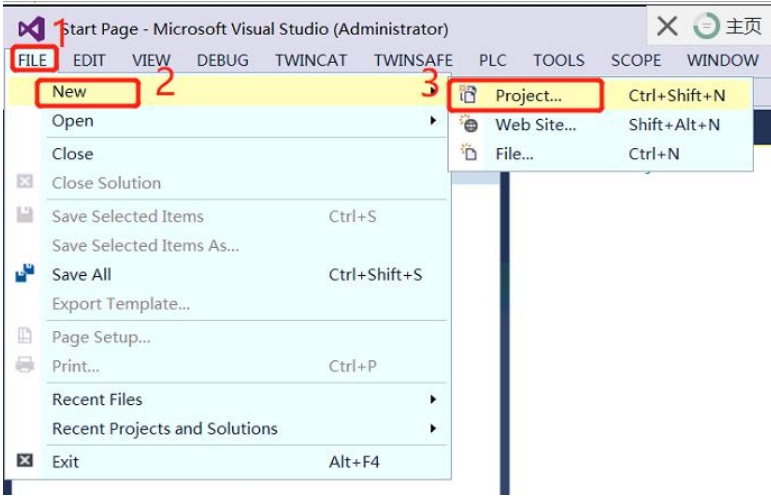
1. Conforme mostrado na Figura 1, abra a barra de menu Arquivo->Novo->Projeto e crie um novo projeto TwinCAT.
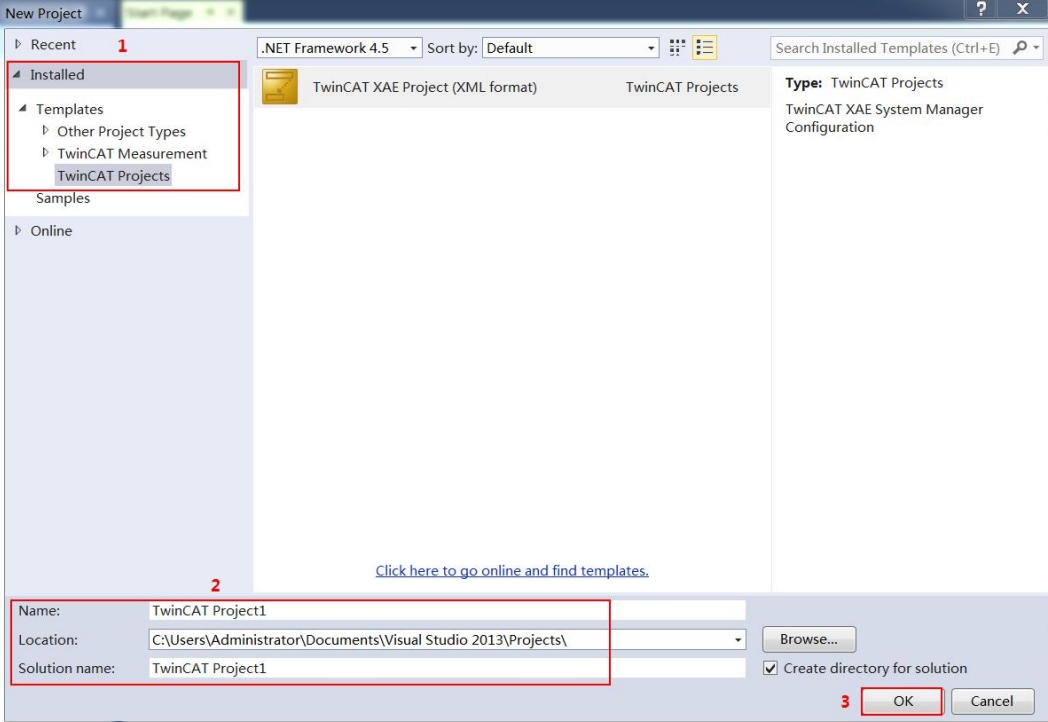
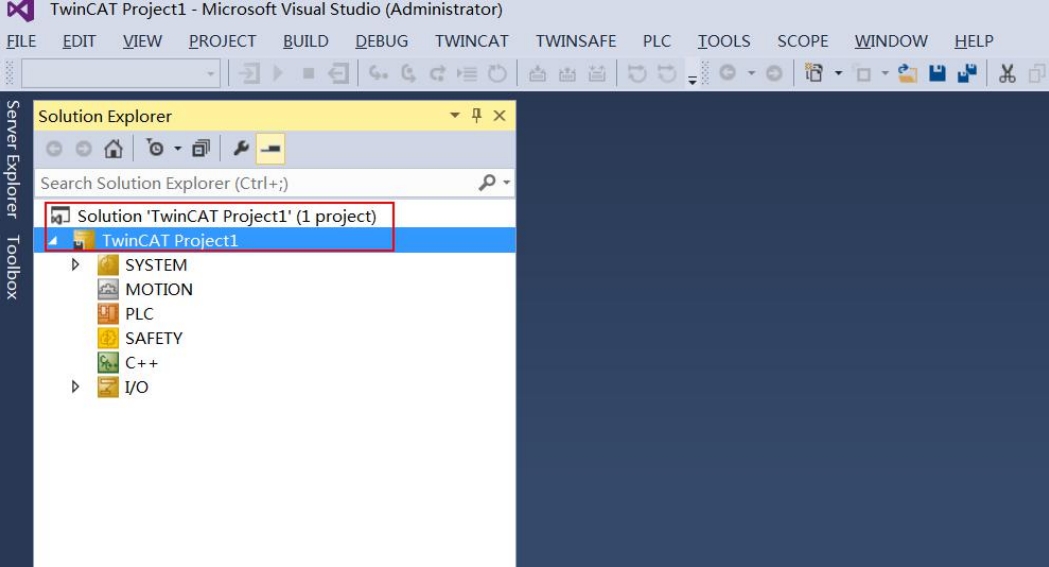
2. A janela Novo Projeto aparece (conforme mostrado na Figura 2), selecione Instalado->Modelos->Projetos TwinCAT à direita, nomeie o projeto em inglês (Nome), selecione o caminho de armazenamento do projeto (Local) e clique em “OK ”Para criar um novo Um projeto chamado “TwinCAT Project1” foi criado (Figura 3).
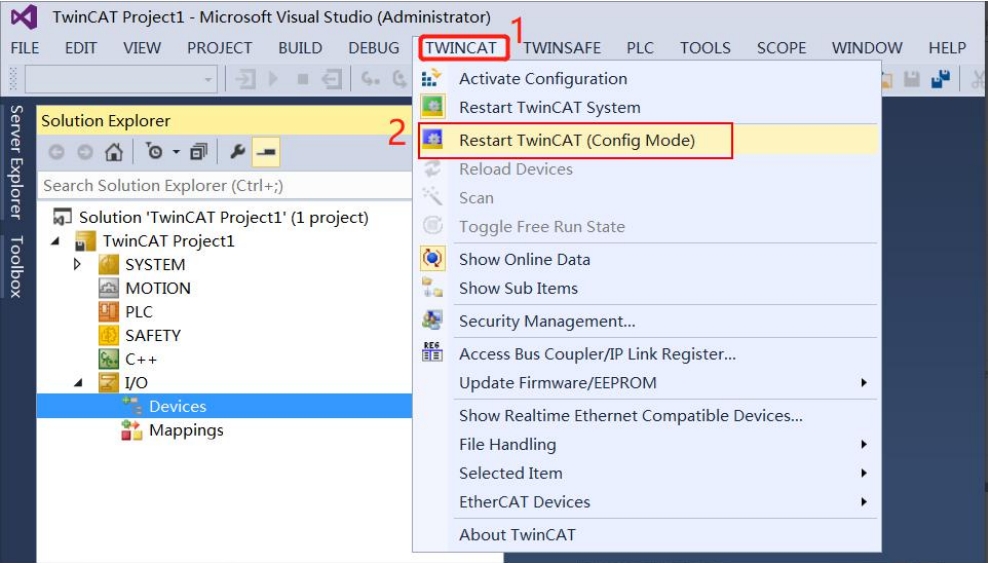
3. Conforme mostrado na Figura 4, clique em TwinCAT->Reiniciar TwinCAT (Modo de Configuração) na barra de menu. A janela do Microsoft Viusal Studio aparecerá (Figura 5) e clique no botão “OK”.

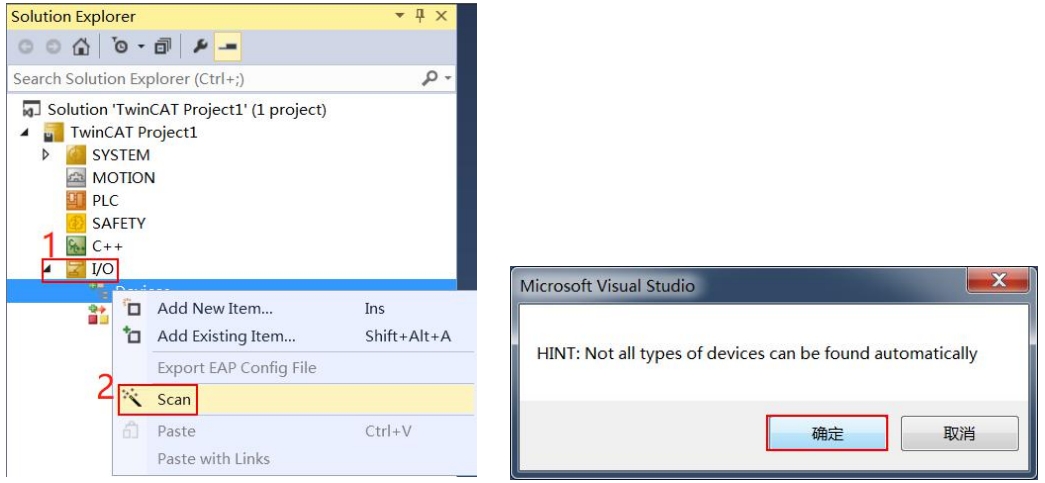
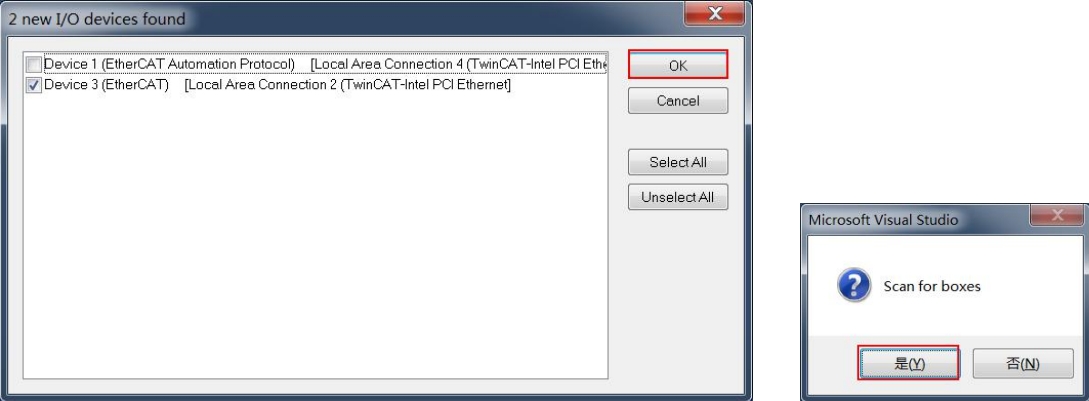
4. Conforme mostrado na Figura 6, selecione I/O no diretório do projeto, clique com o botão direito em Dispositivos->Scan, a janela do Microsoft Viusal Studio aparecerá (como mostrado na Figura 7) e clique no botão “OK”. A janela “novos dispositivos de E/S encontrados” aparece (como mostrado na Figura 8), e o dispositivo selecionado automaticamente é o dispositivo escravo verificado (se o dispositivo selecionado automaticamente não for exibido, significa que o dispositivo escravo não foi verificado , e o dispositivo precisa ser confirmado, o status de funcionamento e a conexão do cabo de rede estão normais), clique no botão “OK”. Basta clicar no botão “OK” ou “Sim” nas janelas pop-up subsequentes (Figura 9~Figura 11).

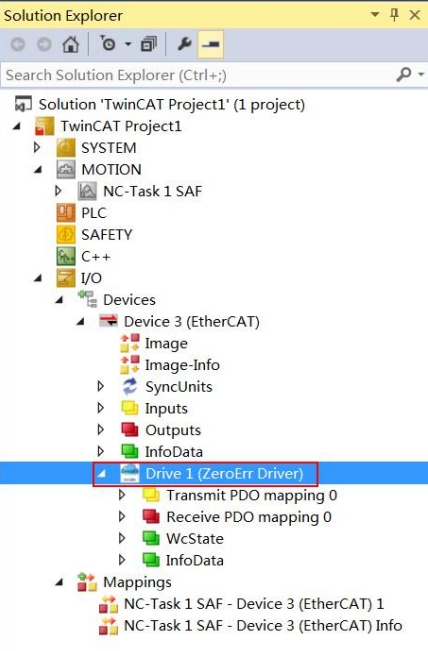
5. Neste ponto, conforme mostrado na Figura 12, o ícone do logotipo do Driver ZeroErr e o nome do dispositivo escravo Drive1 (Zerror Driver) aparecem sob o caminho IO/Devices do projeto “TwinCAT Project1”, indicando que a estação mestre escaneou e conectou com sucesso o servo driver, caso contrário, o servo drive precisa ser confirmado. Se o arquivo XML correspondente e seu caminho de posicionamento estão corretos.
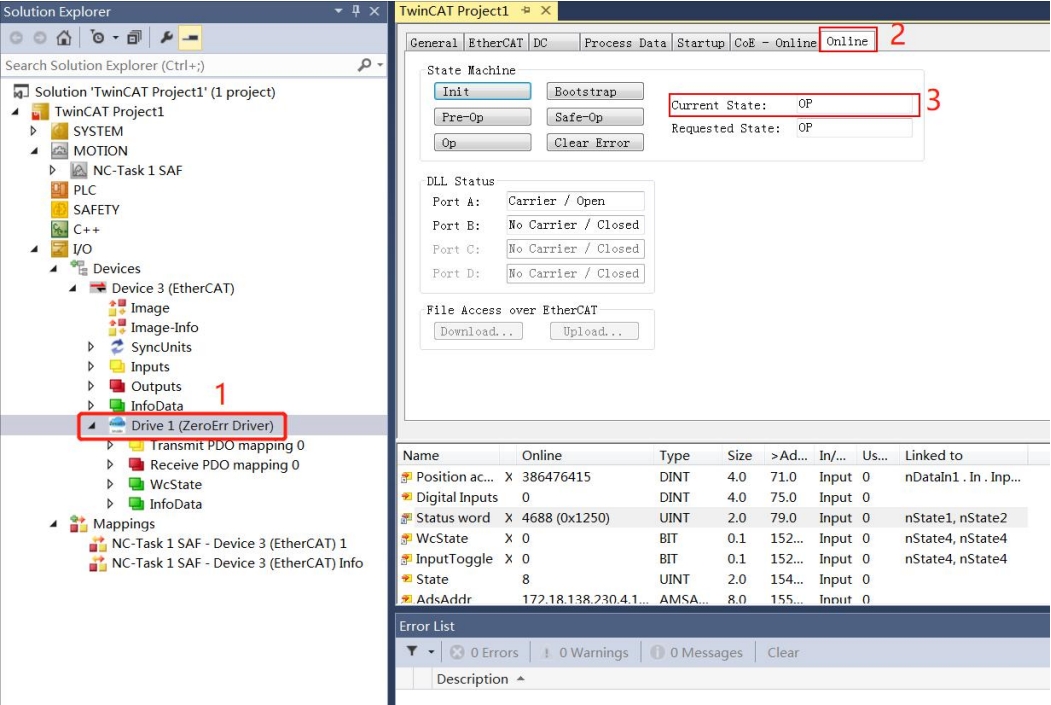
6. Conforme mostrado na Figura 13, clique no nome do dispositivo Drive1 (Zerror Driver), clique em “Online” para visualizar o status da máquina de estado do EtherCAT. Se o estado atual exibir “OP”, significa que o driver entra no modo OP normalmente.
1. O que é um codificador magnético?
O princípio de um codificador magnético é semelhante ao de um codificador óptico, mas utiliza sinais de campo magnético. Dentro do codificador magnético existe um disco magnético e um sensor magnetorresistivo. A rotação do disco magnético provoca uma alteração na intensidade do campo magnético interno, que é detectada pelo sensor magnetorresistivo. O sinal é então processado através do circuito para gerar o sinal de saída. A resolução do codificador magnético é determinada pelo número de pólos magnéticos no disco magnético, pela quantidade de sensores magnetorresistivos e pelo método de processamento do sinal. Uma vantagem de usar princípios de campo magnético para geração de sinais é que os sinais magnéticos não são afetados por poeira, umidade, altas temperaturas ou vibrações.

Em comparação com os codificadores ópticos e de grade tradicionais, os codificadores magnéticos têm características superiores, como resistência à vibração, resistência à corrosão, resistência à poluição, resistência à interferência e uma ampla faixa de temperatura. Eles podem ser aplicados em campos onde os codificadores ópticos tradicionais podem não ser adequados. A série de encoders Faradyi Motors continua aplicável em ambientes agressivos, como áreas contaminadas com óleo, ambientes com alta vibração, alta umidade e condições de temperatura extremas. Os codificadores magnéticos são projetados especificamente para ambientes extremos e desafiadores que exigem amplas características de temperatura, resistência a vibrações e impactos intensos e altos níveis de proteção.
Além disso, nossos codificadores magnéticos apresentam circuitos de saída de sinal confiáveis, métodos de instalação simples e podem reduzir significativamente as perdas por tempo de inatividade. Normalmente usados em metalurgia, fabricação de papel e máquinas para trabalhar madeira, os codificadores magnéticos de alto desempenho encontram amplas aplicações em controle industrial, fabricação mecânica, navios, têxteis, impressão, radar, comunicação e outros campos.
A Faradyi Motors projeta e produz codificadores magnéticos de forma independente. Nossos codificadores magnéticos são conhecidos por sua estrutura simples e compacta, sem pontos de contato, longa vida útil, resistência a altas e baixas temperaturas, resistência à vibração, velocidade de resposta rápida e resiliência aos efeitos de poeira e condensação. Eles são amplamente utilizados por clientes em áreas como robótica, linhas de produção automatizadas, máquinas de montagem, elevadores, máquinas têxteis, máquinas de costura, máquinas de embalagem e impressão, máquinas-ferramentas CNC, plotters, instrumentos de medição de ângulos e muito mais.
2. Vantagens dos codificadores rotativos multivoltas?
3. Diferenças entre codificadores incrementais e absolutos?
Um codificador refere-se a um dispositivo que codifica sinais ou dados, convertendo-os em sinais que podem ser usados para comunicação, transmissão e armazenamento. Podem ser classificados em dois tipos principais: encoders incrementais e absolutos, com amplas aplicações em nossa produção e no dia a dia.
Classificação de codificadores:
-
Codificador incremental: Os codificadores incrementais utilizam o princípio de conversão fotoelétrica para gerar três conjuntos de pulsos de onda quadrada – fases A, B e Z. As fases de pulso A e B possuem uma diferença de fase de 90 graus, permitindo fácil determinação do sentido de rotação. A fase Z fornece um pulso para cada revolução completa, servindo como ponto de referência para posicionamento. Suas vantagens incluem um princípio de construção simples, vida útil mecânica superior a dezenas de milhares de horas, forte capacidade anti-interferência, alta confiabilidade e adequação para transmissão de longa distância. No entanto, ele não pode gerar informações de posição absoluta da rotação do eixo.
-
Codificador Absoluto: Os codificadores absolutos emitem sinais digitais diretamente. Seja em ambientes industriais ou em aplicações externas rigorosas, é crucial aumentar a eficiência, a confiabilidade e a durabilidade. Portanto, os componentes do codificador devem atender a vários requisitos, garantindo ao mesmo tempo máxima durabilidade e maior custo-benefício. Os codificadores magnéticos absolutos multivoltas da série eCoder introduzidos pela ZeroDifference Cloud Control passaram nos testes nas condições ambientais mais adversas do mundo. Esses codificadores combinam robustez confiável, precisão ultra-alta e tecnologia de comunicação avançada, abrindo uma ampla gama de áreas de aplicação altamente atraentes.
-
Codificador Absoluto Híbrido: O encoder absoluto híbrido gera dois conjuntos de informações: um conjunto para detectar posições de pólos magnéticos com funcionalidade de informação absoluta e outro conjunto idêntico às informações de saída de encoders incrementais.
4. O que é um codificador oco?
Os codificadores ocos Faradyi apresentam um furo central de diâmetro máximo de até 83 mm, permitindo que passem facilmente por estruturas mecânicas, cabos, sistemas pneumáticos e muito mais.
Codificadores ocos Faradyi
Com design ultrafino e fixação ou travamento por placas de mola, esses encoders não necessitam de acessórios adicionais durante a instalação. Eles também fornecem absorção de choque, garantindo coaxialidade. Amplamente utilizados em aplicações que exigem alta precisão e espaços compactos, são particularmente adequados para uso com motores CC de acionamento direto.
Os cubos de suporte de precisão personalizáveis facilitam a instalação rápida e precisa.
Quando combinados com os drives incorporados em miniatura da Faradyi Motors, eles permitem o controle servo compacto.
As aplicações incluem equipamentos médicos, juntas robóticas, automação geral e máquinas-ferramentas motorizadas DD, entre outros campos.
5. Uso do codificador: Como calcular o ângulo de rotação?
6. Como ler o valor de saída de posição completa do codificador?
7. Causas de danos ao disco codificador?
8. Como instalar um disco codificador tipo split?
9. O que deve ser considerado ao armazenar e usar codificadores eCoder?
Precauções para uso do codificador:
-
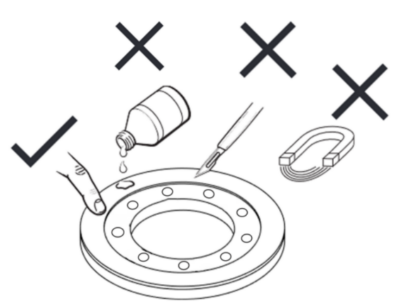
Mantenha-se afastado de materiais magnéticos:
- Evite aproximar a parte magnética do disco codificador de materiais com campo magnético para evitar danos às trilhas magnéticas no disco codificador.
-
Evite a exposição a campos magnéticos:
- Não exponha a parte magnética do disco codificador a um campo magnético com intensidade superficial superior a 20mT, pois isso pode resultar em danos permanentes ao disco codificador.
-
Evite impacto no anel magnético:
- Durante a instalação ou armazenamento do disco codificador, tome cuidado para não impactar a superfície onde o anel magnético está localizado. Certifique-se de que o anel magnético não esteja arranhado. Não use líquidos corrosivos para limpar o disco codificador. Se houver detritos na superfície, remova-os com cuidado usando uma fita de papel sem vestígios.
-
Proteja a cabeça de leitura:
- Tome precauções para proteger a cabeça de leitura para evitar o risco de limalhas de ferro caírem diretamente sobre ela, pois isso pode danificar os componentes.
-
Conscientização sobre eletricidade estática:
- A cabeça de leitura é sensível à eletricidade estática. Sem proteção eletrostática adequada ou em um ambiente não controlado, não toque diretamente com as mãos nos circuitos eletrônicos, fios ou áreas dos sensores.
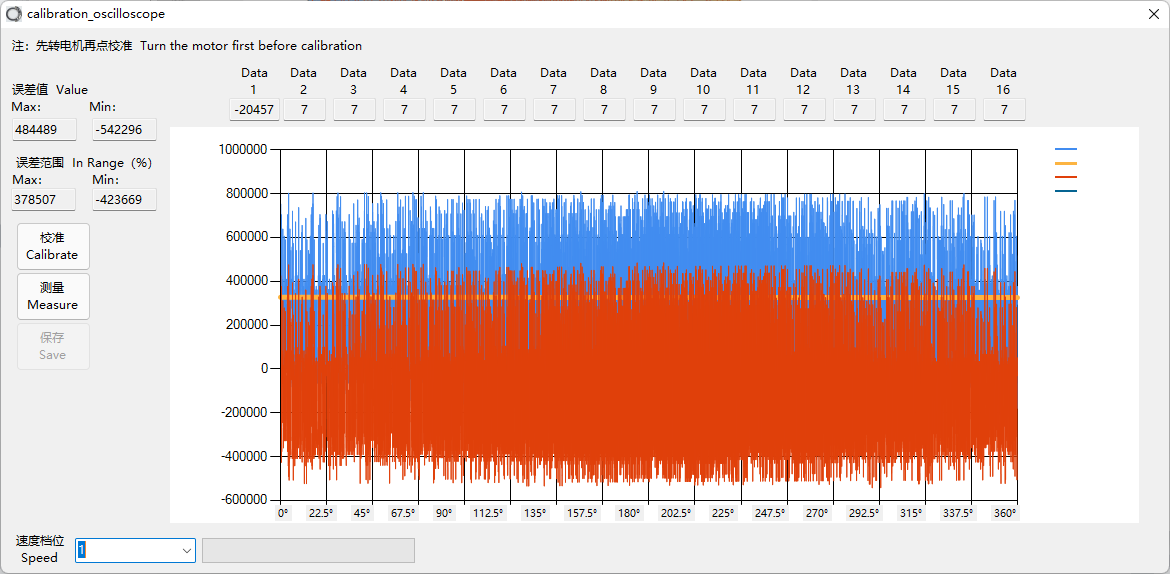
10. Quais são as falhas comuns de calibração dos codificadores eCoder?
Falha na calibração: cenários comuns
- O erro geral excede a tolerância:
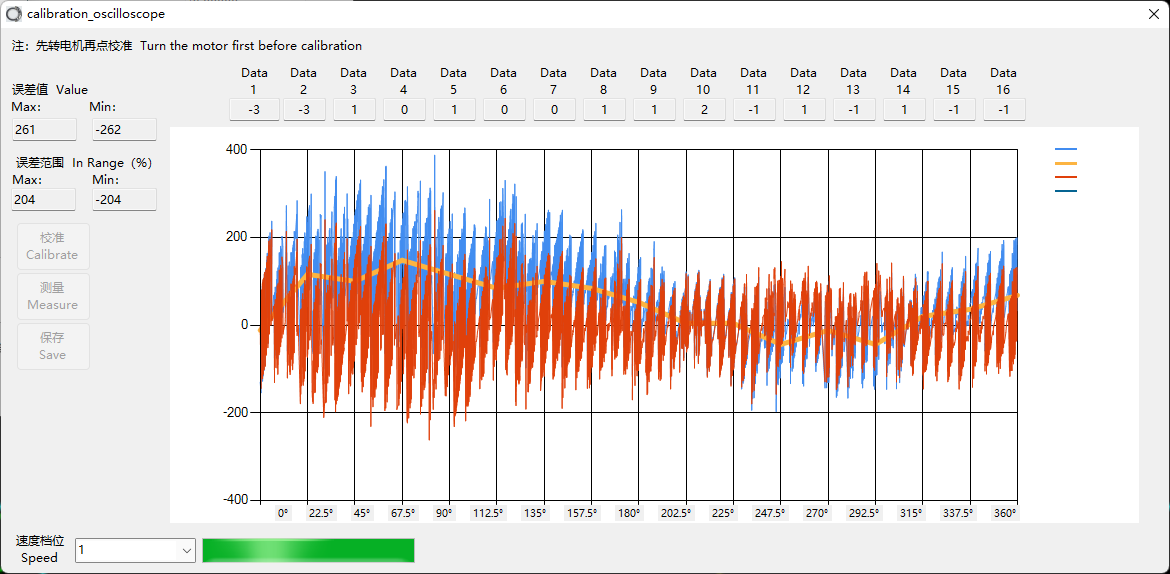
Geralmente, esta forma de onda ocorre devido à instalação estrutural. Verifique ou reajuste a distância de instalação entre a cabeça de leitura e o disco de código. Consulte as instruções de instalação mecânica.
2. Possíveis causas para os picos das formas de onda:
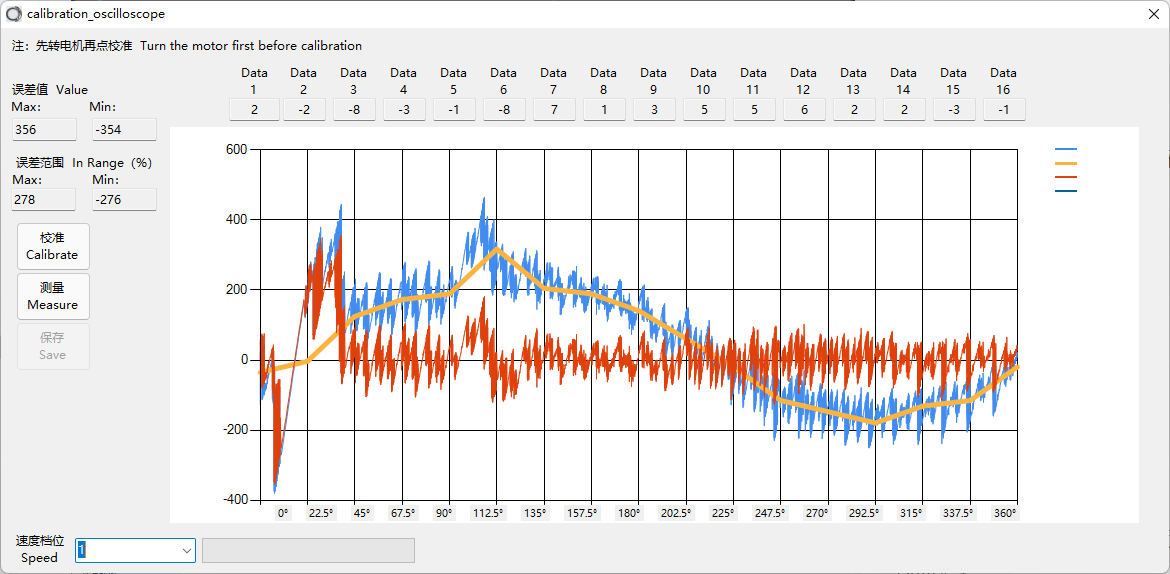
3. Possíveis causas para formas de onda anormais: