Stepper motors can be classified into three main types based on their structural forms: Variable Reluctance (VR), Permanent Magnet (PM), and Hybrid Stepping (HS) motors. The operational performance of stepper motors is closely related to their control methods, which can be categorized into three types: open-loop control systems, closed-loop control systems, and semi-closed-loop control systems. In practical applications, semi-closed-loop control systems are generally classified under open-loop or closed-loop systems.
Variable Reluctance: Variable Reluctance stepper motors have windings on the stator and a rotor made of soft magnetic materials. They are characterized by a simple structure, low cost, and a small step angle, typically reaching 1.2°. However, they exhibit poor dynamic performance, low efficiency, significant heat generation, and reliability challenges.
Permanent Magnet: Permanent Magnet stepper motors have a rotor made of permanent magnet material, and the rotor’s pole count matches that of the stator. They boast good dynamic performance and high output torque, but they suffer from lower precision, with a larger step angle (usually 7.5° or 15°).
Hybrid: Hybrid stepper motors combine the advantages of Variable Reluctance and Permanent Magnet motors. They feature multi-phase windings on the stator and use permanent magnet material on the rotor, incorporating multiple small teeth on both the rotor and stator to enhance step accuracy. Hybrid motors offer high output torque, good dynamic performance, a small step angle, but have a more complex structure and relatively higher cost.
When categorized by the stator winding, stepper motors come in two-phase, three-phase, and five-phase series. The most popular is the two-phase hybrid stepper motor, holding over 97% of the market share due to its cost-effectiveness and excellent performance with subdivision drivers. This motor has a basic step angle of 1.8°/step, which can be reduced to 0.9° with half-step drivers and further subdivided up to 256 times (0.007°/microstep) with subdivision drivers. Due to factors like friction and manufacturing precision, the actual control accuracy is slightly lower. The same stepper motor can be paired with different subdivision drivers to adjust accuracy and performance.
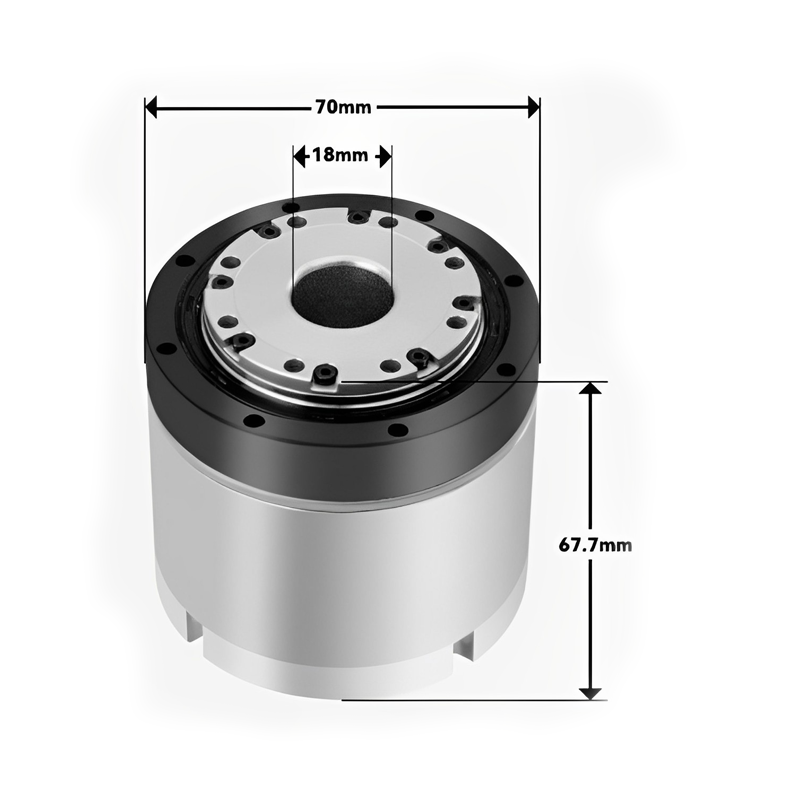
Stepper Motors
Characteristics of Stepper Motors
Advantages:
- Excellent start-stop and reverse response.
- Rotation angle is proportional to the number of pulses.
- Broad speed range as speed is proportional to pulse frequency.
- Maximum torque when the motor is stationary (when windings are energized).
- Precise positioning and repetitive motion due to low error accumulation between steps (3-5% per step).
- Response is determined solely by digital input pulses, allowing for open-loop control, simplifying the motor structure and control costs.
- Slow synchronous rotation is achievable by directly connecting the load to the motor shaft.
- High reliability due to the absence of brushes, and motor lifespan depends only on bearing lifespan.
Disadvantages:
- Challenging to operate at high speeds.
- Obtaining large torque is difficult.
- Risk of resonance if not controlled properly.
- Prone to losing steps when overloaded, causing vibration and noise at high speeds.
- No advantages in terms of volume and weight, with low energy efficiency.
Feel free to let me know if you have any specific preferences or adjustments you’d like!