- (+086) 18923470557
- [email protected]
- 7F, No.53 Fofu Road, Dalang Town, Dongguan City, Guangdong, CN,523770

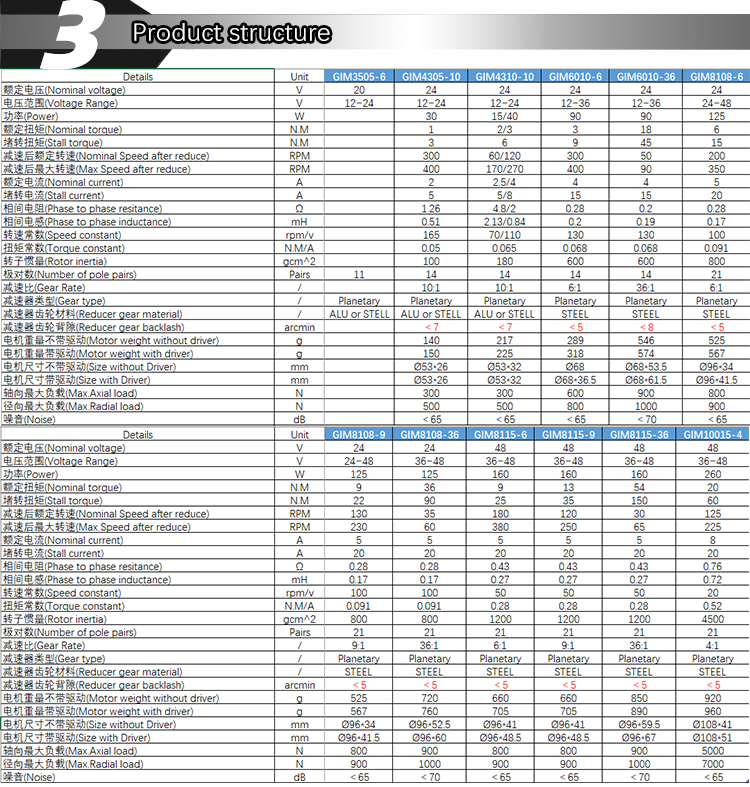
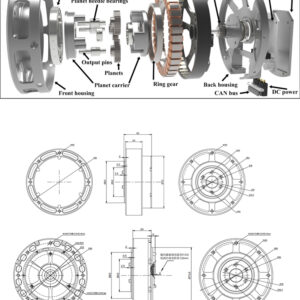
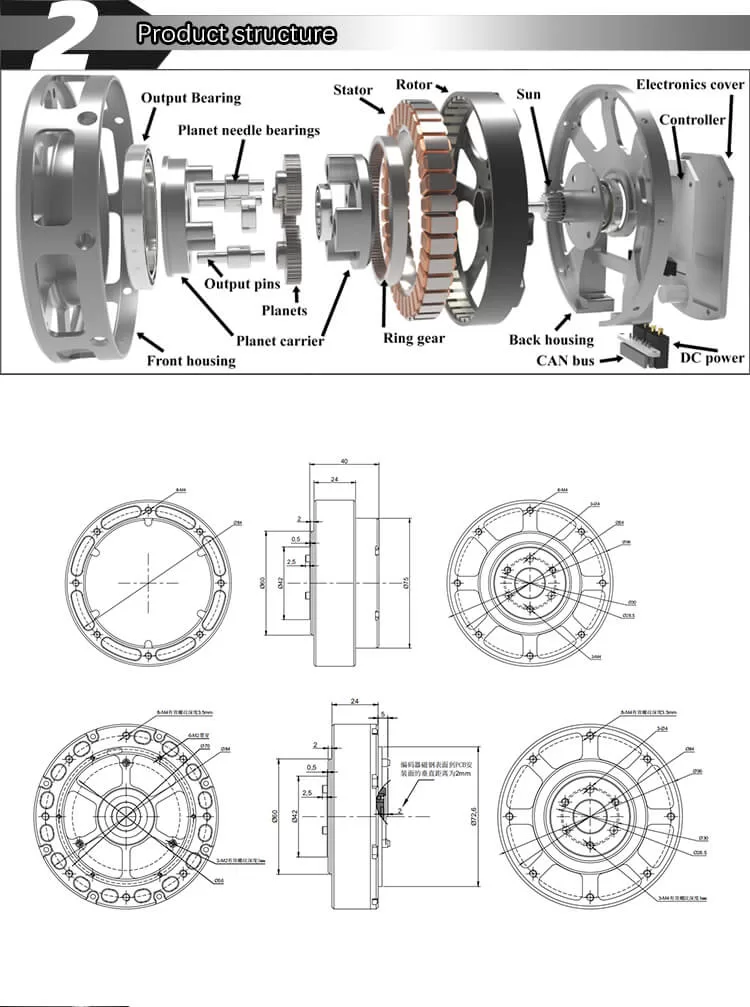
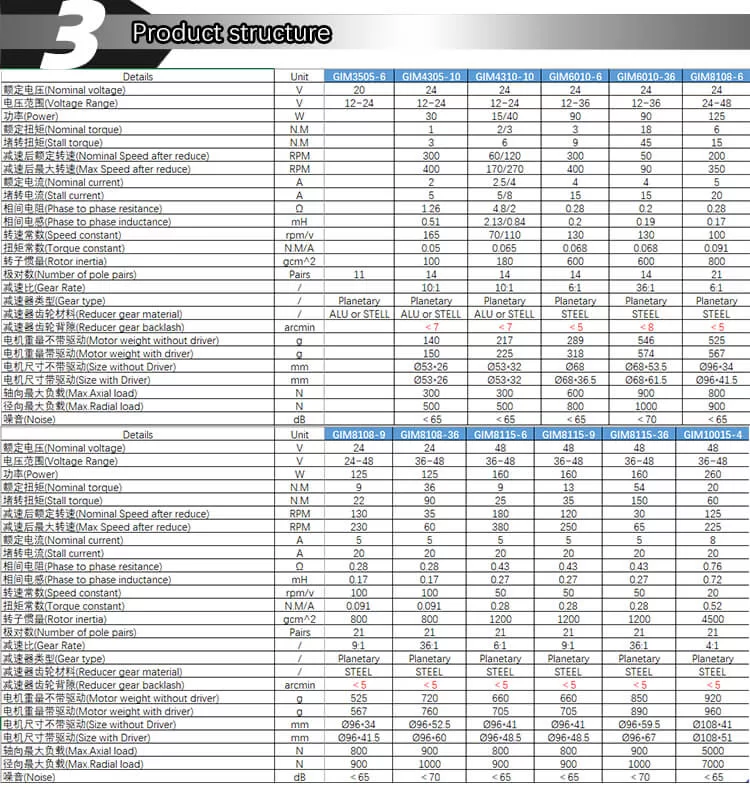
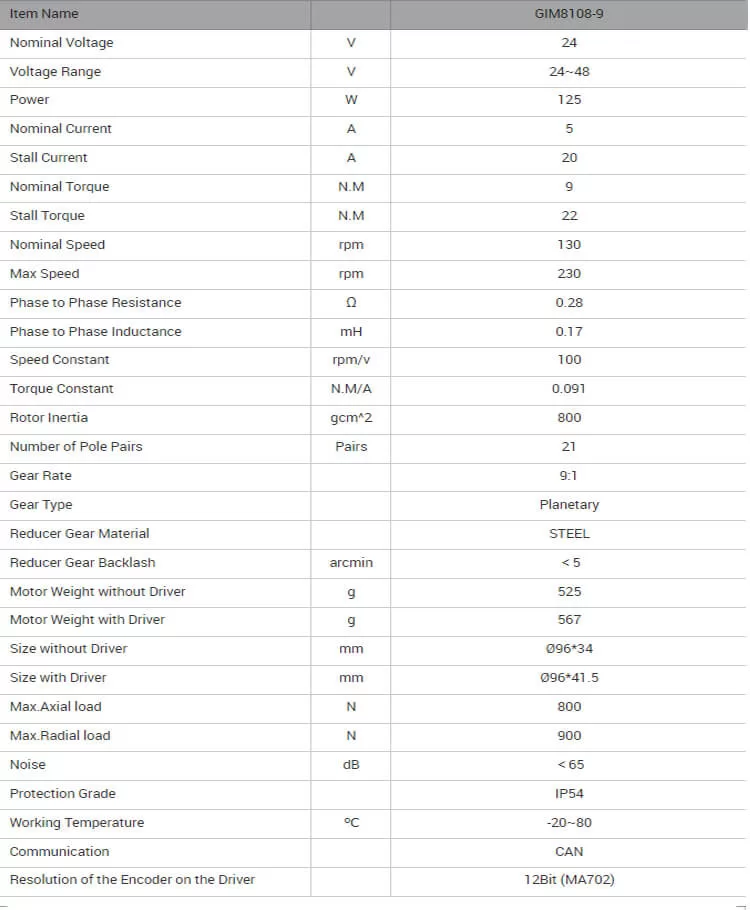
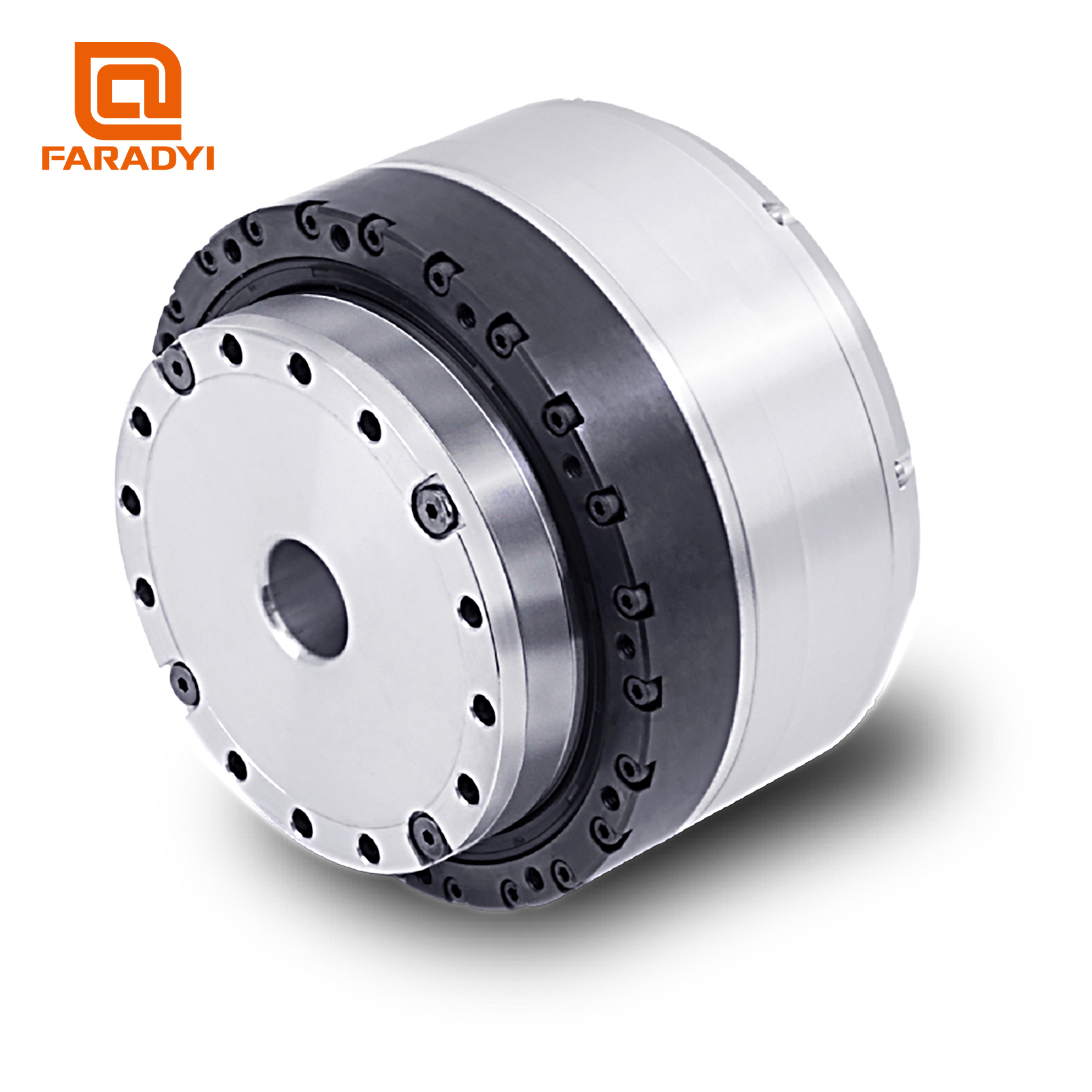
- Rotary Actuator

Faradyi70F

Faradyi70I

Faradyi80I

Faradyi90I
Faradyi110I
Faradyi142I

Faradyi170I

Faradyi70T

Faradyi80T

Faradyi90T

Faradyi110T

Faradyi142T