
Vorteile bürstenloser Gleichstrommotoren (BLDC)
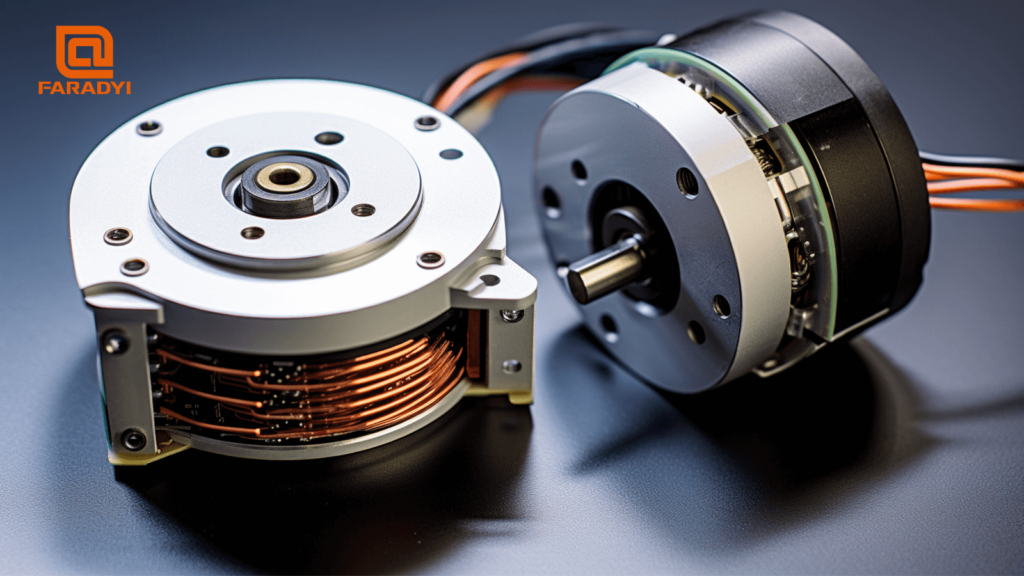
Bürstenlose Gleichstrommotoren (BLDC) sind im Vergleich zu herkömmlichen Wechsel- und Gleichstrommotoren einfach in der Konstruktion, zuverlässig im Betrieb und leicht zu warten, da sie keinen Kommutator, keine Bürsten und keine Schleifringe aufweisen.
Drehmomentwelligkeit bei bürstenlosen Gleichstrommotoren mit Permanentmagnet verstehen
Drehmomentwelligkeit bei bürstenlosen Gleichstrommotoren mit Permanentmagneten ist ein wesentlicher Faktor, der die Leistung und Stabilität des Motors beeinflusst. Durch Optimierung des Motordesigns, Verbesserung der Steueralgorithmen und Integration von Überwachungsgeräten kann die Drehmomentwelligkeit effektiv reduziert und die Motoreffizienz und -stabilität verbessert werden, um den Anforderungen verschiedener Anwendungsszenarien gerecht zu werden.
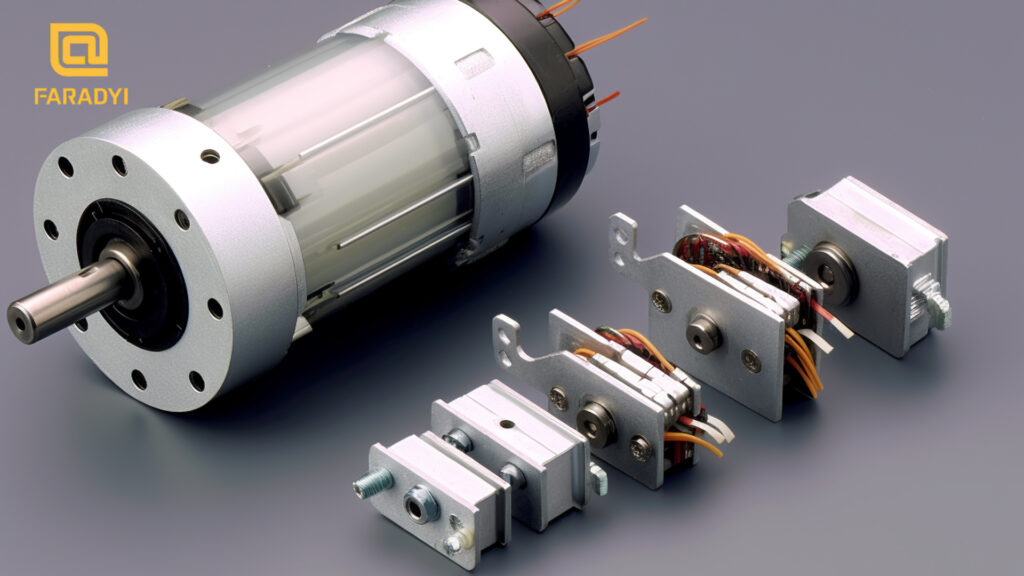
Einführung in die Steuerschaltung für bürstenlose Gleichstrommotoren mit Permanentmagnet

Der Steuerkreis eines bürstenlosen Gleichstrommotors mit Permanentmagnet dient als Kernkomponente des Motorreglers und ist in erster Linie für die Dekodierung von Positionssignalen, die Generierung von Antriebssignalen, die Steuerung von PWM-Hacksignalen sowie die Drehzahlerkennung und -regelung verantwortlich. Darüber hinaus beinhaltet er Funktionen wie Überstromschutz, Sanftanlauf und bidirektionale Rotationssteuerung.
Anwendung von Schrittmotoren in Fotokopierern
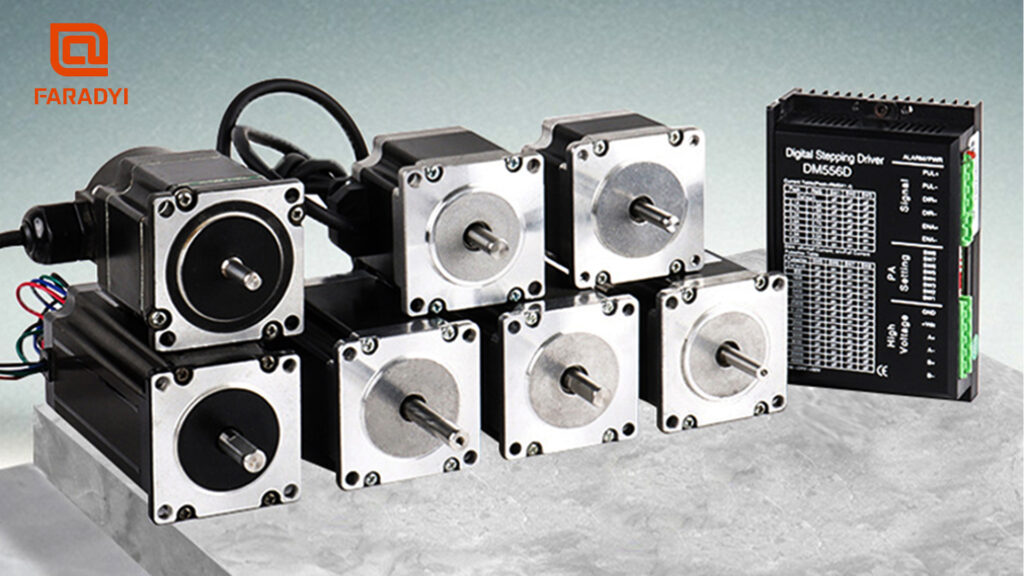
Schrittmotoren werden häufig in den Motoren von Fotokopierern verwendet, die zu den gängigsten Büroautomatisierungsmaschinen gehören. Während Fotokopierer Schrittmotoren, bürstenlose Motoren oder Gleichstrommotoren verwenden können, konzentriert sich dieser Artikel auf die Anwendung von Schrittmotoren in Fotokopierern.
Einführung in die CAD-Software für bürstenlose Gleichstrommotoren

Der Artikel hebt hervor, wie CAD-Technologie den Entwurfsprozess beschleunigen und die Entwurfsqualität verbessern kann, und betont zugleich die Bedeutung grundlegender theoretischer Kenntnisse und Erfahrungen der Designer.
Designtechnische Anforderungen und Prozess des bürstenlosen Gleichstrommotors
Technische Designanforderungen und typischer Designprozess eines bürstenlosen Gleichstrommotors. Für weitere Informationen zum Design bürstenloser Gleichstrommotoren oder zum technischen Support können Sie sich gerne an uns wenden.
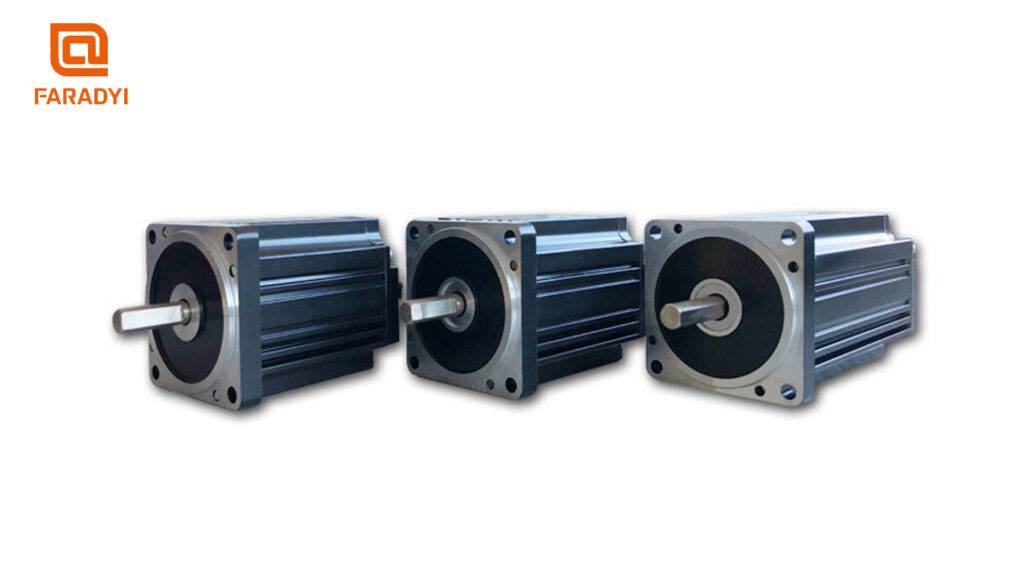
Auswahlmethoden für die Karosseriestruktur bürstenloser Gleichstrommotoren

Die Auswahl der Körperstruktur des bürstenlosen Gleichstrommotors sollte auf einer umfassenden Betrachtung der spezifischen Anwendungsanforderungen und Leistungsanforderungen basieren. Die Wahl der richtigen Struktur kann die Designanforderungen maximieren, die Motoreffizienz verbessern und die Zuverlässigkeit erhöhen.
Technische Normen und Schlüsselparameter von Servosteuerungssystemen

Die technischen Standards und Schlüsselparameter von Servosteuerungssystemen spielen eine entscheidende Rolle für den effizienten und zuverlässigen Betrieb von Servosystemen in verschiedenen Anwendungen. Die richtige Einstellung und Anpassung dieser Parameter ist wichtig, um eine optimale Leistung zu erzielen und die spezifischen Anforderungen verschiedener Servosteuerungsanwendungen zu erfüllen.
Unterschiede in Eigenschaften und Funktionen zwischen DC- und AC-Servomotoren

Die Unterschiede in den Eigenschaften und Funktionen von DC- und AC-Servomotoren spiegeln ihre jeweiligen Stärken und Schwächen wider. AC-Servomotoren eignen sich für Anwendungen, die weiche Eigenschaften und eine breite Anwendung erfordern, während DC-Servomotoren für ihre präzise Drehzahlregelung, ihren reibungslosen Betrieb und ihre Effizienz bekannt sind. Mit dem weiteren technologischen Fortschritt werden bei beiden Motortypen voraussichtlich weitere Verbesserungen erzielt, die zu effizienteren und zuverlässigeren Motorsystemen führen.
So starten und verwenden Sie bürstenlose Motoren

Die meisten bürstenlosen Motoren auf dem Markt verwenden Hall-Sensoren zur Positionserfassung und werden für den Normalbetrieb durch Sinuswellen-Controller gesteuert.